Marrying NeRF with Feature Matching for One-step Pose Estimation
(2404.00891)Abstract
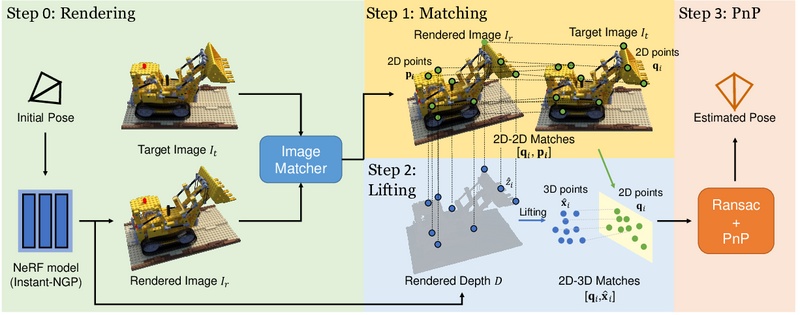
Given the image collection of an object, we aim at building a real-time image-based pose estimation method, which requires neither its CAD model nor hours of object-specific training. Recent NeRF-based methods provide a promising solution by directly optimizing the pose from pixel loss between rendered and target images. However, during inference, they require long converging time, and suffer from local minima, making them impractical for real-time robot applications. We aim at solving this problem by marrying image matching with NeRF. With 2D matches and depth rendered by NeRF, we directly solve the pose in one step by building 2D-3D correspondences between target and initial view, thus allowing for real-time prediction. Moreover, to improve the accuracy of 2D-3D correspondences, we propose a 3D consistent point mining strategy, which effectively discards unfaithful points reconstruted by NeRF. Moreover, current NeRF-based methods naively optimizing pixel loss fail at occluded images. Thus, we further propose a 2D matches based sampling strategy to preclude the occluded area. Experimental results on representative datasets prove that our method outperforms state-of-the-art methods, and improves inference efficiency by 90x, achieving real-time prediction at 6 FPS.
Overview
-
The study introduces a novel framework combining Neural Radiance Fields (NeRF) and feature matching to facilitate one-step pose estimation without the need for CAD models, aiming at improving the speed and accuracy in robotics and augmented reality.
-
NeRF is used to generate high-quality 3D scene representations, while feature matching techniques are employed to establish correspondences between different views, resulting in rapid and accurate pose estimation.
-
Significant innovations include real-time image-based inference, a 3D consistent point mining strategy for enhanced accuracy, and a matching point-based sampling strategy to handle occlusions effectively.
-
The framework outperforms existing methods in efficiency and robustness, showing a 90-fold improvement in inference speed and real-time prediction capabilities at 6 FPS, highlighting its potential for practical applications in robotics and AR.
Marrying NeRF with Feature Matching for One-step Pose Estimation
Introduction to the Study
Recent advances in Neural Radiance Fields (NeRF) have paved the way for significant improvements in realistic 3D scene representation and rendering. On the other hand, pose estimation remains a critical challenge in robotics and augmented reality (AR), traditionally relying on exhaustive feature matching and CAD models or suffering from extensive retraining for novel objects. The study discussed herein aims to reconcile these areas by proposing a novel framework that marries NeRF with feature matching, facilitating a one-step pose estimation process that obviates the need for CAD models and circumvents the extensive training phase.
Underpinning Technologies
The framework integrates two primary components: NeRF and feature matching. NeRF provides a potent mechanism for encoding complex 3D geometries efficiently, rendering high-quality 2D images from arbitrary viewpoints. Simultaneously, feature matching techniques, traditionally used in structure-from-motion (SfM) and SLAM algorithms, offer a reliable means to establish correspondence between different views of an object. Bridging these technologies allows for the leveraging of NeRF's high-fidelity depth rendering with the agility of feature matching, facilitating rapid pose estimation.
Core Contributions
The research introduces several innovative solutions to bolster pose estimation accuracy and expedite the estimation process:
- Real-time Image-based Inference: The proposed method streamlines the pose estimation process, significantly reducing the iterations necessary for accurate pose approximation, thus enabling real-time inference capabilities.
- 3D Consistent Point Mining Strategy: To counteract the inaccuracies inherent in depth information extracted from NeRF, the study presents a novel point mining strategy. This methodology effectively filters out unfaithful 3D points, refining the quality of 2D-3D correspondences and, by extension, the pose estimation accuracy.
- Matching Point Based Sampling Strategy: This strategy adeptly handles occlusions by emphasizing the unoccluded regions indicated by matching points, thus preventing the optimization process from being misled by obscured parts of the image.
Performance Evaluation
The proposed method was subjected to rigorous evaluation against state-of-the-art techniques across various datasets, including synthetic and real-world scenarios. It not only demonstrated a significant enhancement in inference efficiency, with a 90-fold increase compared to previous NeRF-based methods, but also showcased superior robustness to occlusions, achieving real-time prediction at 6 FPS.
Theoretical and Practical Implications
From a theoretical perspective, this study bridges the gap between dense 3D scene representation facilitated by NeRF and the agility of feature matching techniques, providing fresh insights into efficient pose estimation methodologies. Practically, the framework's ability to perform CAD-free real-time pose estimation for novel objects makes it an attractive proposition for robotics, AR, and mobile robotics applications seeking to interact intelligently with an ever-changing environment.
Future Directions
The success of integrating NeRF with feature matching for pose estimation opens up several avenues for future research. Exploring the application of this methodology in robot manipulation and extending it to SLAM tasks present promising areas for extending the utility of this novel framework. Furthermore, the incorporation of machine learning algorithms for dynamic feature matching and the optimization of NeRF rendering could further enhance the efficiency and accuracy of pose estimation.
Conclusion
The proposed one-step pose estimation framework represents a significant stride towards real-time, accurate, and robust pose estimation for novel objects without reliance on CAD models or extensive retraining. By combining the strengths of NeRF and feature matching, the research paves the way for advanced applications in robotics and AR, ensuring seamless interaction with the 3D world.