- The paper introduces the GSC framework that uses skill-centric diffusion models to sample joint distributions of skills for long-horizon task planning.
- It leverages probabilistic modeling to enforce constraints and capture action dependencies, outperforming methods like CEM-RL and STAP.
- Simulations and real-world trials validate GSC’s adaptability to unseen environments and its efficient, scalable task completion.
Generative Skill Chaining: Long-Horizon Skill Planning with Diffusion Models
Introduction
The paper "Generative Skill Chaining: Long-Horizon Skill Planning with Diffusion Models" (2401.03360) addresses the challenges inherent in planning for long-horizon tasks in manipulation domains. These tasks typically include complex dependencies among subtasks, making traditional greedy sequencing approaches myopic and less scalable. The paper introduces Generative Skill Chaining (GSC), a framework that leverages skill-centric diffusion models to learn and compose skill distributions for efficient long-horizon task planning.
The GSC framework samples from all skill models in parallel, which facilitates reasoning about action dependencies, constraints handling, and overall task generalization. Simulations and real-world trials validate the framework's scalability and efficiency.
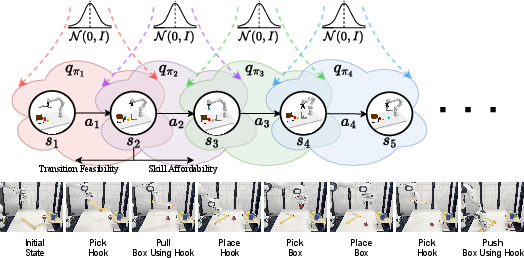
Figure 1: Generative Skill Chaining approach in solving a long-horizon TAMP problem.
Methodology
Probabilistic Framework
The GSC framework operates as a probabilistic method that learns skill-centric diffusion models and their compositions for generating long-horizon plans during inference. It samples all skill models simultaneously, enforcing geometric constraints and ensuring efficient task resolution. Traditional approaches depend heavily on exhaustive searches or rely on deterministic policy priors, which can be limiting for scalability. The GSC framework consolidates individual skill diffusion models into a joint distribution that forms the basis for sampling valid skill chains.
Skill Diffusion Models
The methodology employs skill-level probabilistic generative models. These models capture the joint distribution of preconditions, skill parameters, and effects. Sampling valid skill chains involves generating skill parameters and post-condition states sequentially, with each step constrained by the initial state and final goal conditions.
For instance, a robot, tasked with placing objects accurately within a constrained environment, could leverage diffusion models to simultaneously reason about action dependencies and constraints.
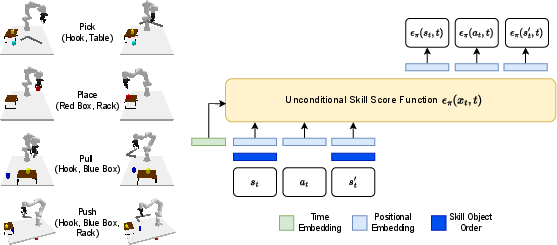
Figure 2: The transformer-based skill diffusion model used for state-action-state distribution modeling.
Implementation Strategy
Skill Chaining and Environment Setup
In implementing GSC in practical scenarios, an environment setup must allow for the execution and collection of state-action-state transitions for individual skills. These transitions are the basis for training diffusion models. Moreover, the models must flexibly adapt to new scene configurations that may involve varying object poses, necessitating robust compositional structures and sequences.
Constraint Guidance
Incorporating classifiers for constraints into the generative process allows for additional task-specific command layers during inference. This inclusion is paramount for real-world scenarios where environments frequently impose complex constraints, such as avoiding collisions or ensuring task completion within spatial limitations.
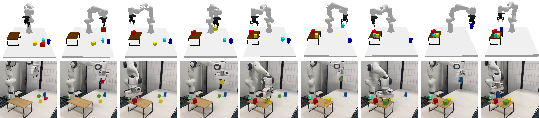
Figure 3: Task simulation and open-loop hardware rollouts demonstrating constrained solving.
Results and Analysis
The paper's results offer a comparison between GSC and various baseline methods like CEM-RL and STAP. GSC demonstrated superior performance in multiple domains by efficiently handling constraints and broader action-dependent horizons. The task completion rates far surpassed those of traditional methods.
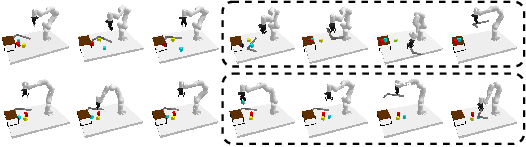
Figure 4: Example illustrating dependency factor influence on task rollout correctness.
Generalization to Perturbations
A notable highlight is the framework's ability to generalize across unseen task settings and environments. The GSC framework affords seamless integration with real-time feedback loops for replanning, a critical component for application in dynamic real-world robotic systems.
Conclusion
Generative Skill Chaining presents a significant advancement in manipulation planning for long-horizon tasks using diffusion models. By offering a flexible, scalable approach to task and motion planning, it addresses both theoretical and practical limitations of existing skill-chaining strategies, providing potential avenues for future research and application in highly intricate manipulation tasks. The paper's insights inspire deeper exploration into extending the framework with auto-regressive elements or further augmenting diffusion models' capabilities for online adaptation.