Dissipativity-Based Decentralized Co-Design of Distributed Controllers and Communication Topologies for Vehicular Platoons
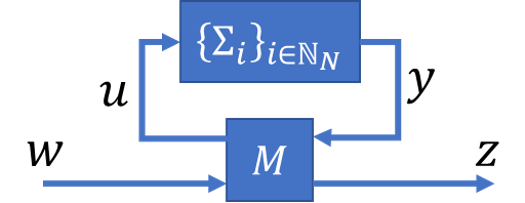
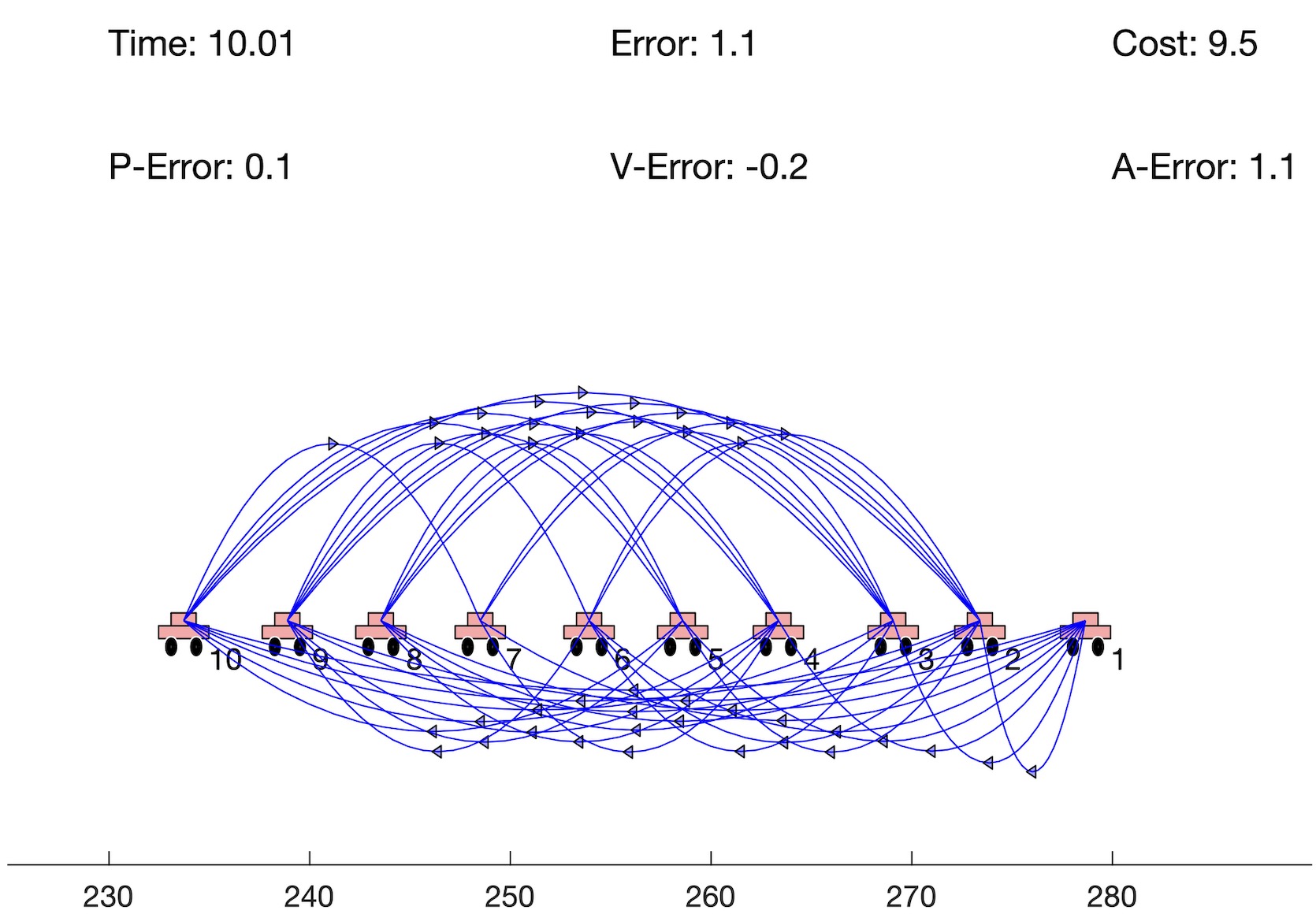
Abstract: Vehicular platoons provide an appealing option for future transportation systems. Most of the existing work on platoons separated the design of the controller and its communication topologies. However, it is beneficial to design both the platooning controller and the communication topology simultaneously, i.e., controller and topology co-design, especially in the cases of platoon splitting and merging. We are, therefore, motivated to propose a co-design framework for vehicular platoons that maintains both the compositionality of the controller and the string stability of the platoon, which enables the merging and splitting of the vehicles in a platoon. To this end, we first formulate the co-design problem as a centralized linear matrix inequality (LMI) problem and then decompose it using Sylvester's criterion to obtain a set of smaller decentralized LMI problems that can be solved sequentially at individual vehicles in the platoon. Moreover, in the formulated decentralized LMI problems, we encode a specifically derived local LMI to enforce the $L_2$ stability of the closed-loop platooning system, further implying the $L_2$ weak string stability of the vehicular platoon. Finally, to validate the proposed co-design method and its features in terms of merging/splitting, we provide an extensive collection of simulation results generated from a specifically developed simulation framework. Available in GitHub: HTTP://github.com/NDzsong2/Longitudinal-Vehicular-Platoon-Simulator.git that we have made publicly available.
- B. Besselink and K. H. Johansson, “String stability and a delay-based spacing policy for vehicle platoons subject to disturbances,” IEEE Transactions on Automatic Control, vol. 62, no. 9, pp. 4376–4391, 2017.
- D. Jia, K. Lu, J. Wang, X. Zhang, and X. Shen, “A survey on platoon-based vehicular cyber-physical systems,” IEEE Communications Surveys & Tutorials, vol. 18, no. 1, pp. 263–284, 2015.
- G. Fiengo, D. G. Lui, A. Petrillo, S. Santini, and M. Tufo, “Distributed robust pid control for leader tracking in uncertain connected ground vehicles with v2v communication delay,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 3, pp. 1153–1165, 2019.
- N. Tavan, M. Tavan, and R. Hosseini, “An optimal integrated longitudinal and lateral dynamic controller development for vehicle path tracking,” Latin American Journal of Solids and Structures, vol. 12, pp. 1006–1023, 2015.
- Y. Wang, R. Su, and B. Wang, “Optimal control of interconnected systems with time-correlated noises: Application to vehicle platoon,” Automatica, vol. 137, p. 110018, 2022.
- J. Ploeg, D. P. Shukla, N. Van De Wouw, and H. Nijmeijer, “Controller synthesis for string stability of vehicle platoons,” IEEE Transactions on Intelligent Transportation Systems, vol. 15, no. 2, pp. 854–865, 2013.
- I. Herman, D. Martinec, Z. Hurák, and M. Šebek, “Nonzero bound on fiedler eigenvalue causes exponential growth of h-infinity norm of vehicular platoon,” IEEE Transactions on Automatic Control, vol. 60, no. 8, pp. 2248–2253, 2014.
- N. Chen, M. Wang, T. Alkim, and B. Van Arem, “A robust longitudinal control strategy of platoons under model uncertainties and time delays,” Journal of Advanced Transportation, vol. 2018, 2018.
- F. Morbidi, P. Colaneri, and T. Stanger, “Decentralized optimal control of a car platoon with guaranteed string stability,” in European Control Conference, 2013, pp. 3494–3499.
- A. Syed, G. Yin, A. Pandya, H. Zhang et al., “Coordinated vehicle platoon control: Weighted and constrained consensus and communication network topologies,” in Proc. of 51st Conference on Decision and Control, 2012, pp. 4057–4062.
- L. Xiao and F. Gao, “Practical string stability of platoon of adaptive cruise control vehicles,” IEEE Transactions on Intelligent Transportation Systems, vol. 12, no. 4, pp. 1184–1194, 2011.
- X. Guo, J. Wang, F. Liao, and R. S. H. Teo, “Distributed adaptive integrated-sliding-mode controller synthesis for string stability of vehicle platoons,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 9, pp. 2419–2429, 2016.
- Y. Zhu and F. Zhu, “Distributed adaptive longitudinal control for uncertain third-order vehicle platoon in a networked environment,” IEEE Transactions on Vehicular Technology, vol. 67, no. 10, pp. 9183–9197, 2018.
- F.-C. Chou, S.-X. Tang, X.-Y. Lu, and A. Bayen, “Backstepping-based time-gap regulation for platoons,” in Proc. of American Control Conference, 2019, pp. 730–735.
- X. Ji, X. He, C. Lv, Y. Liu, and J. Wu, “Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits,” Control Engineering Practice, vol. 76, pp. 41–53, 2018.
- B. Li and F. Yu, “Design of a vehicle lateral stability control system via a fuzzy logic control approach,” Proc. of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, vol. 224, no. 3, pp. 313–326, 2010.
- G. Guo and S. Wen, “Communication scheduling and control of a platoon of vehicles in VANETs,” IEEE Transactions on intelligent transportation systems, vol. 17, no. 6, pp. 1551–1563, 2015.
- S. Dasgupta, V. Raghuraman, A. Choudhury, T. N. Teja, and J. Dauwels, “Merging and splitting maneuver of platoons by means of a novel PID controller,” in 2017 IEEE Symposium Series on Computational Intelligence (SSCI). IEEE, 2017, pp. 1–8.
- M. Goli and A. Eskandarian, “MPC-based lateral controller with look-ahead design for autonomous multi-vehicle merging into platoon,” in Proc. of American Control Conference, 2019, pp. 5284–5291.
- A. Morales and H. Nijmeijer, “Merging strategy for vehicles by applying cooperative tracking control,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 12, pp. 3423–3433, 2016.
- O. Orki and S. Arogeti, “Control of mixed platoons consist of automated and manual vehicles,” in 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE). IEEE, 2019, pp. 1–6.
- Y. Yan, H. Du, D. He, and W. Li, “Pareto optimal information flow topology for control of connected autonomous vehicles,” IEEE Transactions on Intelligent Vehicles, vol. 8, no. 1, pp. 330–343, 2022.
- Y. Zheng, S. E. Li, J. Wang, D. Cao, and K. Li, “Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies,” IEEE Transactions on intelligent transportation systems, vol. 17, no. 1, pp. 14–26, 2015.
- H. Hao, P. Barooah, and P. G. Mehta, “Stability margin scaling laws for distributed formation control as a function of network structure,” IEEE Transactions on Automatic Control, vol. 56, no. 4, pp. 923–929, 2011.
- H. Hao and P. Barooah, “On achieving size-independent stability margin of vehicular lattice formations with distributed control,” IEEE Transactions on Automatic Control, vol. 57, no. 10, pp. 2688–2694, 2012.
- Z. Song, S. Welikala, P. J. Antsaklis, and H. Lin, “Distributed Adaptive Backstepping Control for Vehicular Platoons with Mismatched Disturbances Using Vector String Lyapunov Functions,” arXiv e-prints, p. 2207.02101, 2022. [Online]. Available: http://arxiv.org/abs/2207.02101
- S. Welikala, H. Lin, and P. Antsaklis, “A Generalized Distributed Analysis and Control Synthesis Approach for Networked Systems with Arbitrary Interconnections,” in Proc. of 30th Mediterranean Conf. on Control and Automation, 2022, pp. 803–808.
- E. D. Sontag and Y. Wang, “On characterizations of the input-to-state stability property,” Systems & Control Letters, vol. 24, no. 5, pp. 351–359, 1995.
- M. Arcak, “Compositional Design and Verification of Large-Scale Systems Using Dissipativity Theory,” IEEE Control Systems Magazine, vol. 42, no. 2, pp. 51–62, 2022.
- J. C. Willems, “Dissipative Dynamical Systems Part I: General Theory,” Archive for Rational Mechanics and Analysis, vol. 45, no. 5, pp. 321–351, 1972.
- S. Welikala, H. Lin, and P. J. Antsaklis, “Non-Linear Networked Systems Analysis and Synthesis using Dissipativity Theory,” in Proc. of American Control Conf., 2023, pp. 2951–2956.
- S. Welikala, H. Lin, and P. Antsaklis, “On-line Estimation of Stability and Passivity Metrics,” in Proc. of 61st IEEE Conf. on Decision and Control (accepted), 2022. [Online]. Available: http://arxiv.org/abs/2204.00073
- S. Welikala, H. Lin, and P. J. Antsaklis, “A Generalized Distributed Analysis and Control Synthesis Approach for Networked Systems with Arbitrary Interconnections,” arXiv e-prints, p. 2204.09756, 2022. [Online]. Available: http://arxiv.org/abs/2204.09756
- J. Ploeg, N. Van De Wouw, and H. Nijmeijer, “Lp string stability of cascaded systems: Application to vehicle platooning,” IEEE Transactions on Control Systems Technology, vol. 22, no. 2, pp. 786–793, 2013.
- Z. Song, S. Welikala, P. J. Antsaklis, and H. Lin, “Distributed Adaptive Backstepping Control for Vehicular Platoons with Mismatched Disturbances Using Vector String Lyapunov Functions,” in Proc. of American Control Conf., 2023, pp. 1–6.
- C. Sun, S. Welikala, and C. G. Cassandras, “Optimal Composition of Heterogeneous Multi-Agent Teams for Coverage Problems with Performance Bound Guarantees,” Automatica, vol. 117, p. 108961, 2020.
- R. Tibshirani, “Regression Shrinkage and Selection via the Lasso,” Journal of the Royal Statistical Society: Series B, vol. 58, no. 1, pp. 267–288, 1996.
- J. Lofberg, “YALMIP : A Toolbox for Modeling and Optimization in MATLAB,” in Proc. of IEEE Intl. Conf. on Robotics and Automation, 2004, pp. 284–289.
- D. de S. Madeira, “Necessary and Sufficient Dissipativity-Based Conditions for Feedback Stabilization,” IEEE Trans. on Automatic Control, vol. 67, no. 4, pp. 2100–2107, 2022.
- S. Welikala, H. Lin, and P. J. Antsaklis, “Centralized and Decentralized Techniques for Analysis and Synthesis of Non-Linear Networked Systems,” arXiv e-prints, p. 2209.14552, 2022. [Online]. Available: http://arxiv.org/abs/2209.14552
Paper Prompts
Sign up for free to create and run prompts on this paper using GPT-5.
Top Community Prompts
Collections
Sign up for free to add this paper to one or more collections.

