- The paper introduces SMART-LLM to translate high-level instructions into executable multi-robot task plans.
- The framework employs LLMs for task decomposition, coalition formation, and optimal robot task allocation with notable performance metrics.
- Real-world trials demonstrate the system's robust execution and potential for dynamic multi-agent task planning.
SMART-LLM: Smart Multi-Agent Robot Task Planning using LLMs
The paper "SMART-LLM: Smart Multi-Agent Robot Task Planning using LLMs" (2309.10062) introduces a novel framework designed to leverage LLMs for facilitating task planning in multi-agent robotic systems. This work aims to translate high-level natural language instructions into executable task plans for multi-robot teams, focusing on task decomposition, coalition formation, task allocation, and execution.
Introduction
Recent advancements in multi-robot systems have showcased their ability to significantly enhance efficiency across various domains. However, these systems pose challenges such as coordinating heterogeneous robots with diverse skill sets. This paper addresses these challenges by proposing a framework, SMART-LLM, which uses LLMs to break down complex natural language instructions into sub-tasks, form coalitions among robots, and allocate tasks effectively, enabling coherent execution by robot teams.
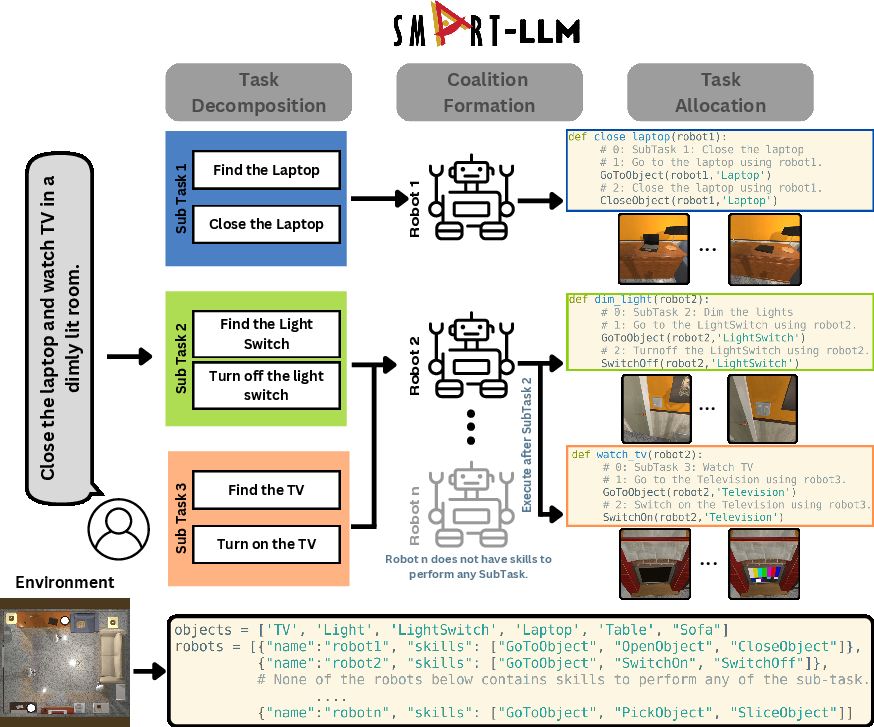
Figure 1: An overview of SMART-LLM showing the task planning stages using LLMs for multi-agent systems.
Methodology
The proposed methodology of SMART-LLM is divided into four main stages, each crucial for planning tasks in multi-robot environments.
Task Decomposition
Task decomposition involves converting a high-level task instruction into a set of structured sub-tasks that can be individually managed and executed. SMART-LLM uses pre-defined robot skills and environmental details to inform the LLM of possible decompositions. These decompositions are framed as Pythonic scripts, which enhance the LLM's ability to generate executable plans.
Once tasks are broken down, SMART-LLM assesses which robots, based on their skills, should collaborate to accomplish each sub-task. This coalition formation step is critical for ensuring that tasks exceeding the capability of a single robot are handled effectively by a team. The LLM is prompted with examples of robot skills and environmental contexts, allowing it to generate a comprehensive coalition policy.
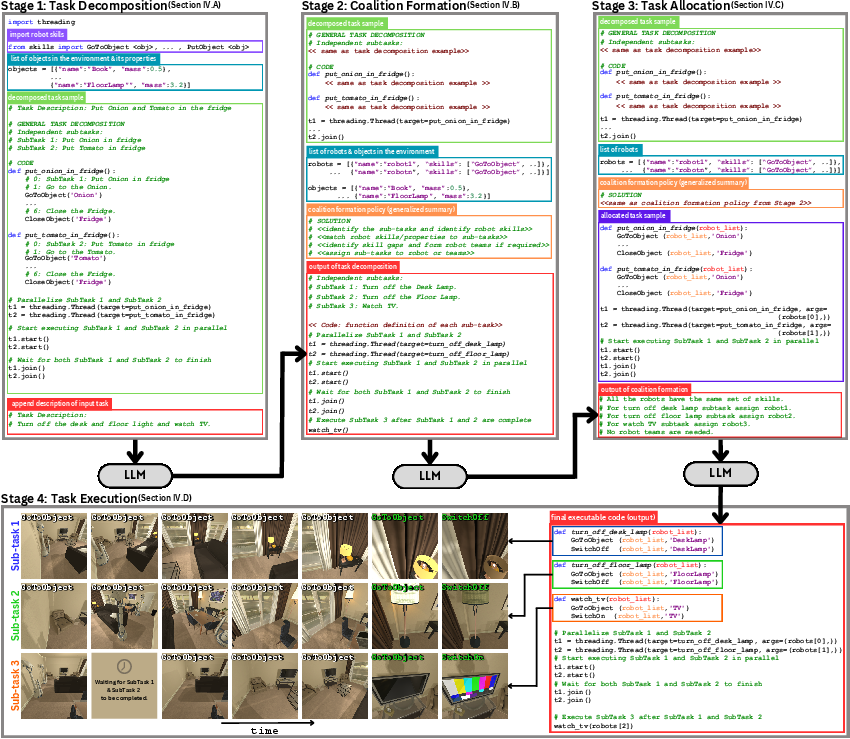
Figure 2: System overview of SMART-LLM showing the four core stages from task decomposition to task execution.
Task Allocation
In the task allocation phase, the LLM allocates specific or groups of robots to each sub-task using the coalition policy derived earlier. This stage generates executable code by determining the optimal assignment of robots to tasks, ensuring efficient resource utilization and parallel execution where feasible.
Task Execution
Finally, the allocated plans are executed by the robots. The LLM-generated Python code calls upon pre-programmed APIs that trigger the robots' low-level functionalities, thus closing the loop from planning to action.
Results
The robustness of SMART-LLM was evaluated using a new benchmark dataset constructed within the AI2-THOR simulation environment. This dataset covers elemental to complex task categories, providing a comprehensive test bed for the framework. Key metrics such as Success Rate (SR), Task Completion Rate (TCR), Goal Condition Recall (GCR), and Robot Utilization (RU) were used to evaluate performance.
SMART-LLM exhibited impressive results, especially in complex task settings requiring sophisticated coalition formation and task allocation decisions. Different LLM backbones including GPT-3.5, GPT-4, Llama2, and Claude-3 were tested, with GPT-4 and Claude-3 demonstrating superior logical reasoning capabilities.
Real-World Application
In real-world trials, SMART-LLM was applied to tasks such as visibility coverage using heterogeneous robot teams. The system successfully generated task plans that optimally assigned available robots to tasks, reflecting its applicability in practical settings.
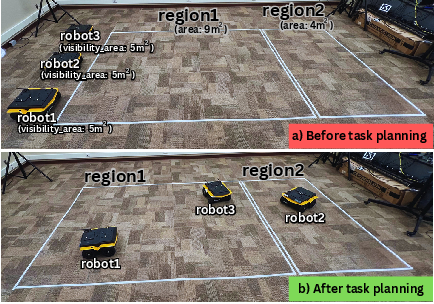
Figure 3: Real-robot experiment displaying effective task planning and execution in a patrolling scenario.
Conclusion
SMART-LLM represents a significant advancement in multi-agent robotic task planning, leveraging the reasoning power of LLMs to automatically translate abstract task instructions into coherent plans. This approach highlights the potential for integrating LLMs into robotics and suggests pathways for future enhancements, such as incorporating dynamic task redistributions and exploring agent-specific LLM configurations for even greater adaptability. Further studies could focus on extending the framework's capabilities to include real-time adaptation of task plans in dynamic environments.

