- The paper introduces Shield-MPPI, integrating discrete-time CBFs into MPPI to secure robust control under disturbances.
- It employs a double-layer safety mechanism with local repair optimization to reduce computational demand while ensuring safety.
- Extensive simulations and real-world tests on AutoRally confirm substantial crash rate reduction and improved operational efficiency.
Shield Model Predictive Path Integral: A Computationally Efficient Robust MPC Approach Using Control Barrier Functions
The paper presents Shield-MPPI, an advanced algorithm aimed at enhancing the robustness and efficiency of Model Predictive Path Integral (MPPI) Control using Control Barrier Functions (CBFs). This approach is designed to improve the adaptability and safety of autonomous systems subject to disturbances and limited computational resources.
Introduction to MPPI and Its Challenges
MPPI is a sampling-based model predictive control framework that generates optimal control strategies through trajectory simulation. Although effective, MPPI is limited by its sensitivity to unmodeled dynamics and environmental disturbances, as well as its substantial computational demands, particularly when deploying on systems without high-performance GPUs.
Existing Approaches
Various MPPI variants have been developed to mitigate these limitations:
Contributions of Shield-MPPI
Shield-MPPI integrates discrete-time CBFs to create a double-layer safety mechanism:
- Safety Shield Using CBFs: Incorporates CBFs into the trajectory cost to penalize constraint violations, thus prioritizing safety during trajectory sampling.
- Local Repair Optimization: Applies gradient-based optimization to locally adjust control actions for ensuring safety even when trajectory samples are limited.
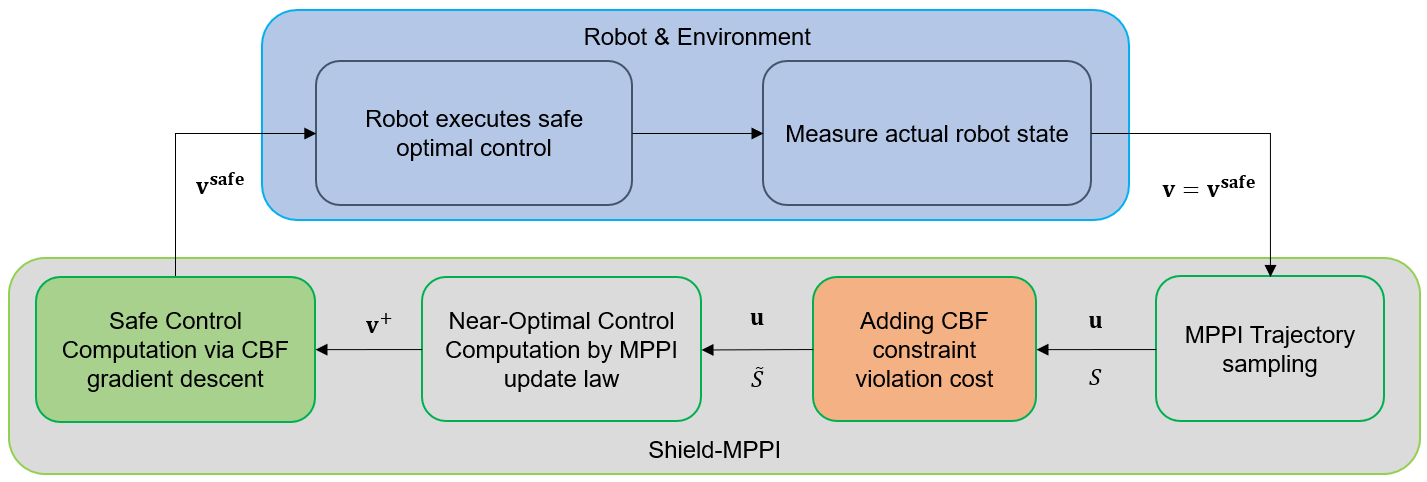
Figure 2: Shield-MPPI control architecture.
Advantages over Standard MPPI
Comparative Analysis
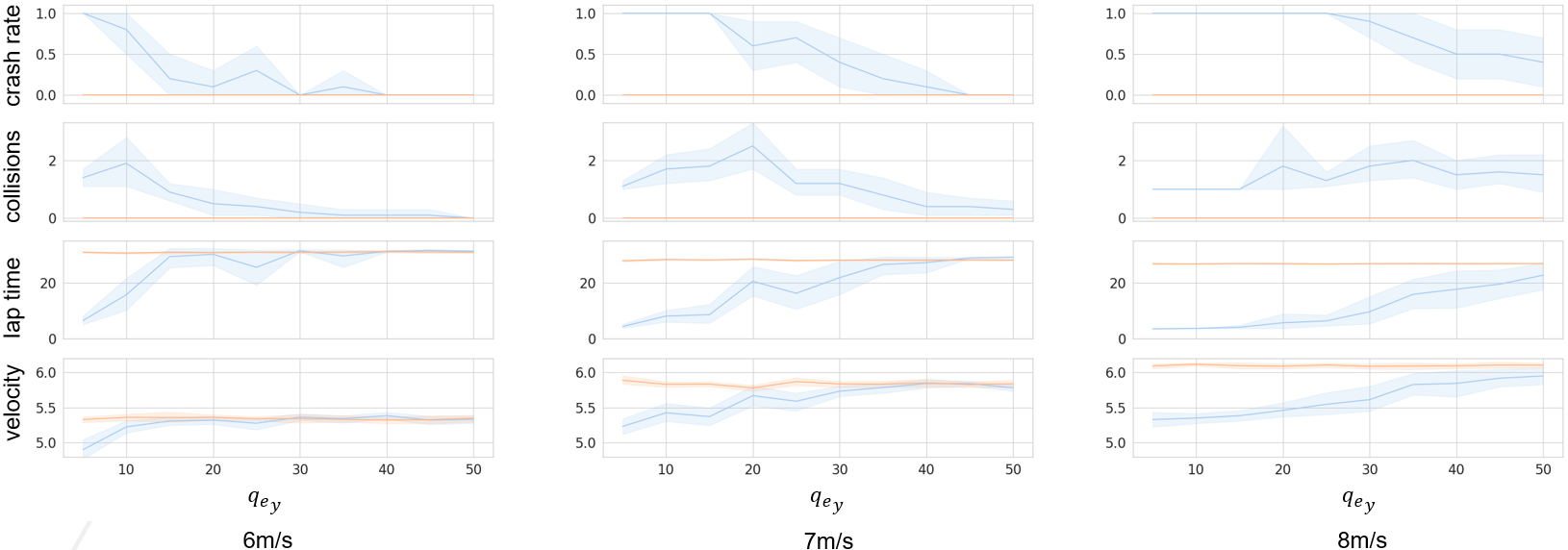
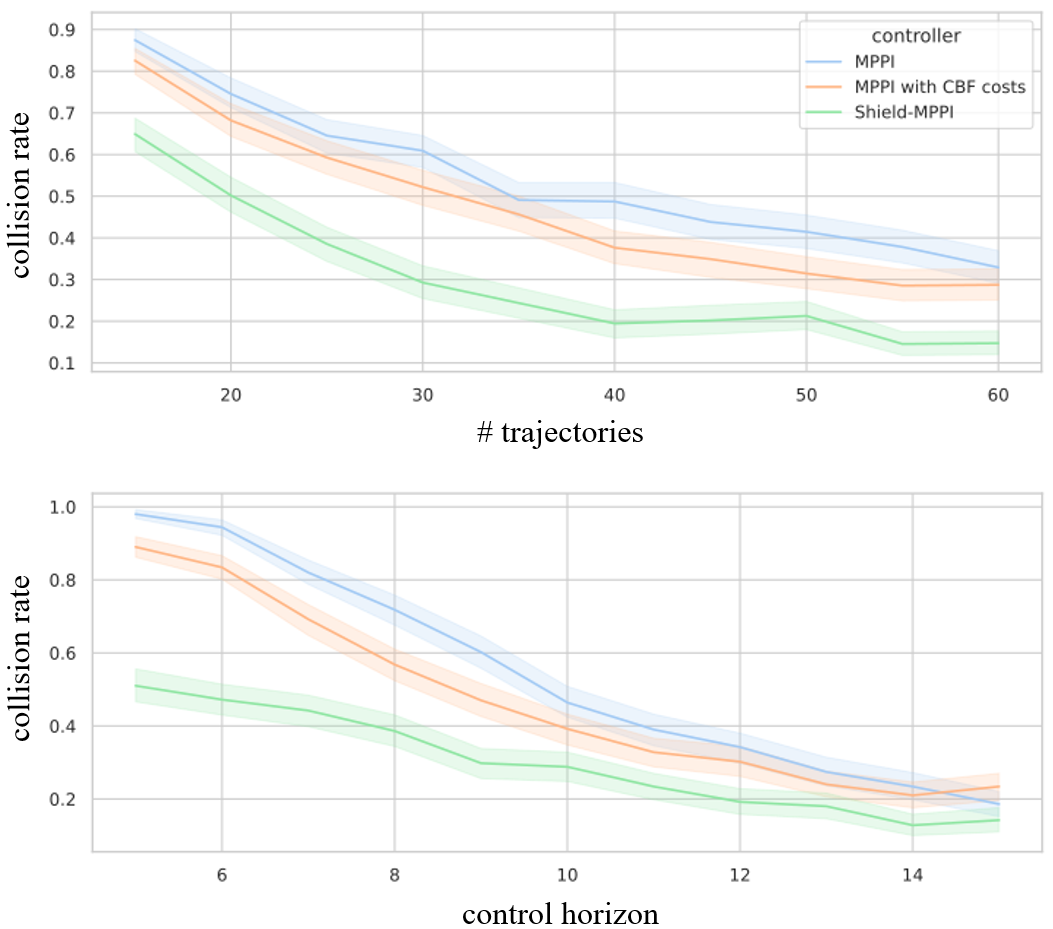
Shield-MPPI was evaluated against standard MPPI and stochastic MPC variants such as RA-MPPI and CS-SMPC through extensive simulations. It demonstrated superior crash rate reduction and handling of disturbances while maintaining high velocities efficiently (Figure 5).
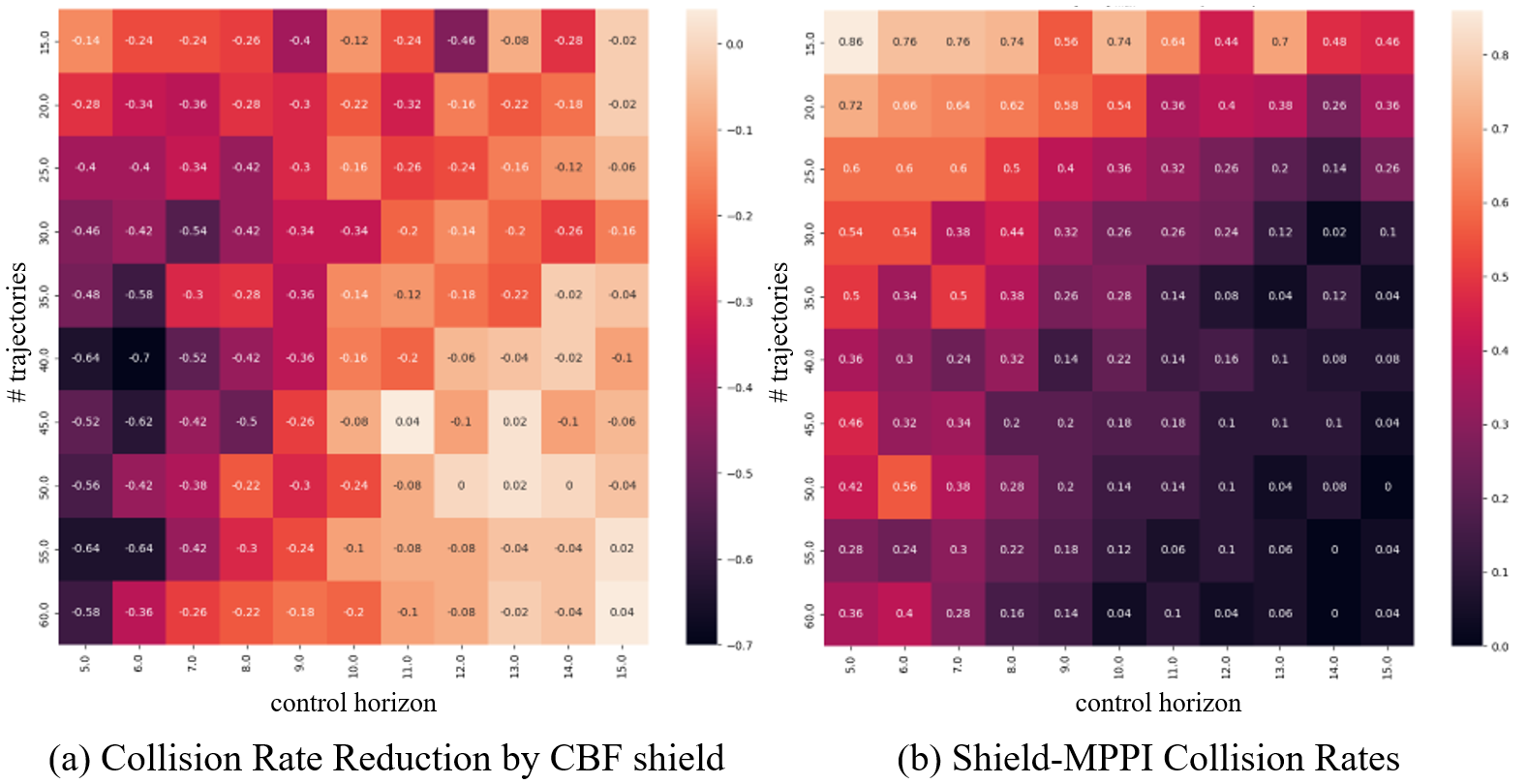
Figure 5: Collision rate reduction and absolute collision rate of Shield-MPPI controller.
Experimental Validation
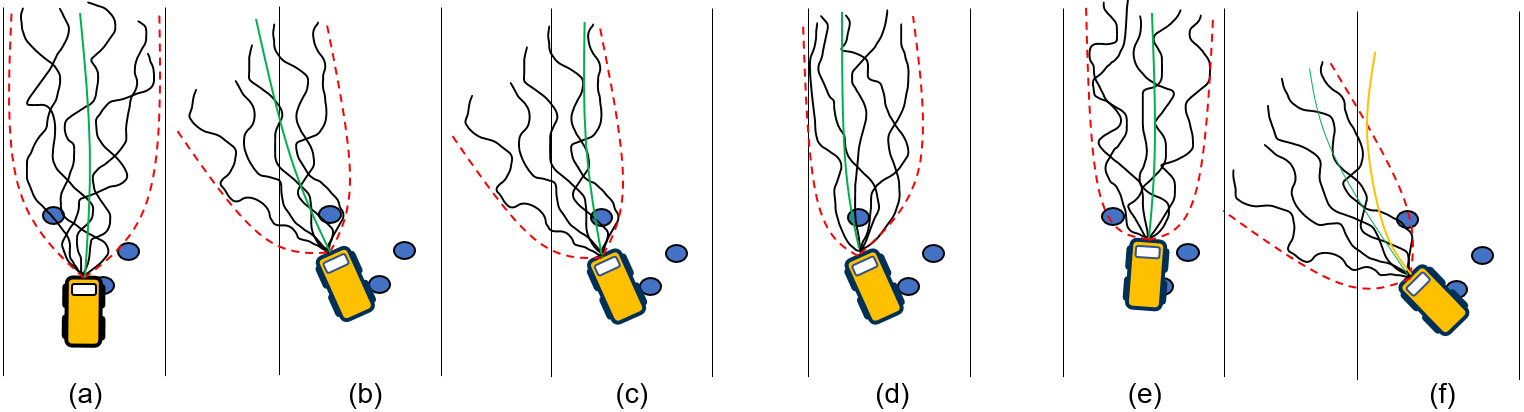
Real-world tests on the AutoRally platform confirmed Shield-MPPI's capability to maintain safety and improve operational efficiency despite external disturbances, achieving notable speed enhancements with reduced computational resources (Figure 6).

Figure 6: AutoRally experiment.
Conclusion
The Shield-MPPI framework offers a significant advancement in robust MPC, particularly beneficial for autonomous systems that must operate efficiently under constraints. By effectively integrating CBFs, Shield-MPPI ensures safety while optimizing performance, facilitating broader adoption in fields like autonomous driving and drone navigation where computational power is limited.
Future efforts may involve expanding the Shield-MPPI's applicability using learned certificates and deploying it in more complex, multi-agent settings, enhancing its utility in diverse robotic applications.