- The paper introduces the Comprehensive Reactive Safety framework, shifting from fixed trajectory planning to dynamic strategies based on real-time observations.
- The paper presents the Reactive ILQR algorithm, which optimizes a tree of reactive trajectories to safely navigate complex urban driving scenarios.
- The research demonstrates that strategic planning can overcome conservative reachability limits, paving the way for more adaptive and efficient autonomous driving.
Comprehensive Reactive Safety: Reassessing Trajectory Planning in Autonomous Driving
Introduction
The research paper "Comprehensive Reactive Safety: No Need For A Trajectory If You Have A Strategy" (2207.00198) introduces a pioneering framework for enhancing safety in autonomous driving systems by rethinking the conventional trajectory-based planning paradigm. Traditional approaches, focused on planning collision-free trajectories, often suffer from conservative assumptions that limit the ability of autonomous vehicles (AVs) to navigate complex driving scenarios effectively. This paper proposes a novel framework termed Comprehensive Reactive Safety (CRS) and an accompanying algorithm, Reactive ILQR (RILQR), which emphasizes strategic planning that adapts to dynamic changes in the environment.
Limitations of Traditional Reachability-Based Planning
In traditional motion planning, safety is ensured by maintaining trajectories that remain disjoint from any possible occupied regions in space-time, as determined by reachability analysis. However, this approach often results in overly conservative planning, particularly in dynamically evolving environments such as urban traffic. A typical scenario demonstrating this limitation occurs during overtaking maneuvers, where the potential future positions of other vehicles create expansive unreachable sets, hindering the progress of the AV (Figure 1).
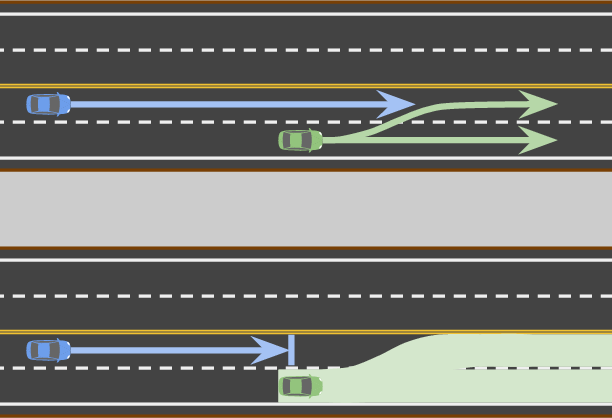
Figure 1: A scenario where the fast autonomous vehicle (blue) is overtaking a slow vehicle (green). The potential lane keeping and lane change trajectories of the other vehicle are drawn as green arrows on the top; the corresponding (spatial) reachable sets are drawn on the bottom. The unbounded growth of the reachable set eventually blocks all the ways to make progress.
Comprehensive Reactive Safety (CRS) Framework
The CRS framework redefines safety conditions by considering the AV's ability to react to new observations in real-time. Instead of planning a fixed trajectory, the AV plans a strategy that maps potential future situations to appropriate reactive trajectories. This strategic planning allows the AV to safely navigate even when a single trajectory cannot avoid all possible future obstacles, thus significantly broadening the range of feasible solutions.
Key aspects of the CRS framework include:
Reaction Causality: The strategy must only diverge into different reactive trajectories after the environment has diverged into distinct states, accounting for delays in sensing and processing.
Reaction Safety: Each trajectory within the strategy must avoid collisions with its corresponding future states, thereby ensuring that the AV can safely navigate all plausible future scenarios.
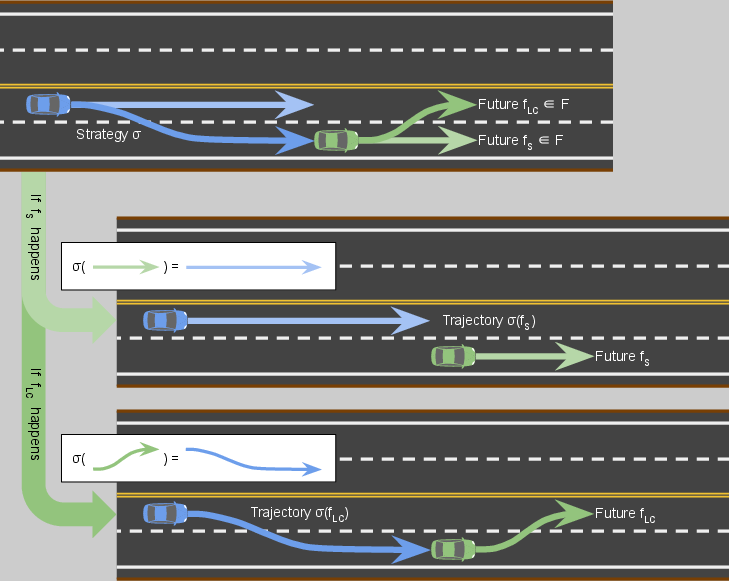
Figure 2: A strategy reacting to the two possible futures in the overtake scenario, labeled LC (for lane change) and S (for straight) respectively.
Reactive ILQR Algorithm
The Reactive ILQR algorithm adapts the traditional ILQR control approach to optimize over a tree-like structure of strategic trajectories rather than a single linear trajectory. This tree represents various reactive paths the AV can take in response to different future scenarios. The algorithm employs variational optimization with constraints to ensure collision avoidance in all branches of the strategic tree.
In scenarios such as intersection crossing, unprotected left turns, and lane merging, RILQR demonstrates the ability to make strategic decisions that improve safety and efficiency compared to traditional planners. These scenarios often involve interactions where traditional planners might yield excessively due to an inability to account for future observations, thereby reducing the AV's operational capabilities (Figures 4, 5, 6, 7).
Experimental Evaluation
Experiments were conducted across four representative urban driving scenarios, showing that RILQR significantly outperforms the conservative reachability-based planner. For instance, in intersection crossing scenarios, RILQR increased the AV's pass rate by demonstrating an enhanced ability to navigate and negotiate with other vehicles (Figure 3).
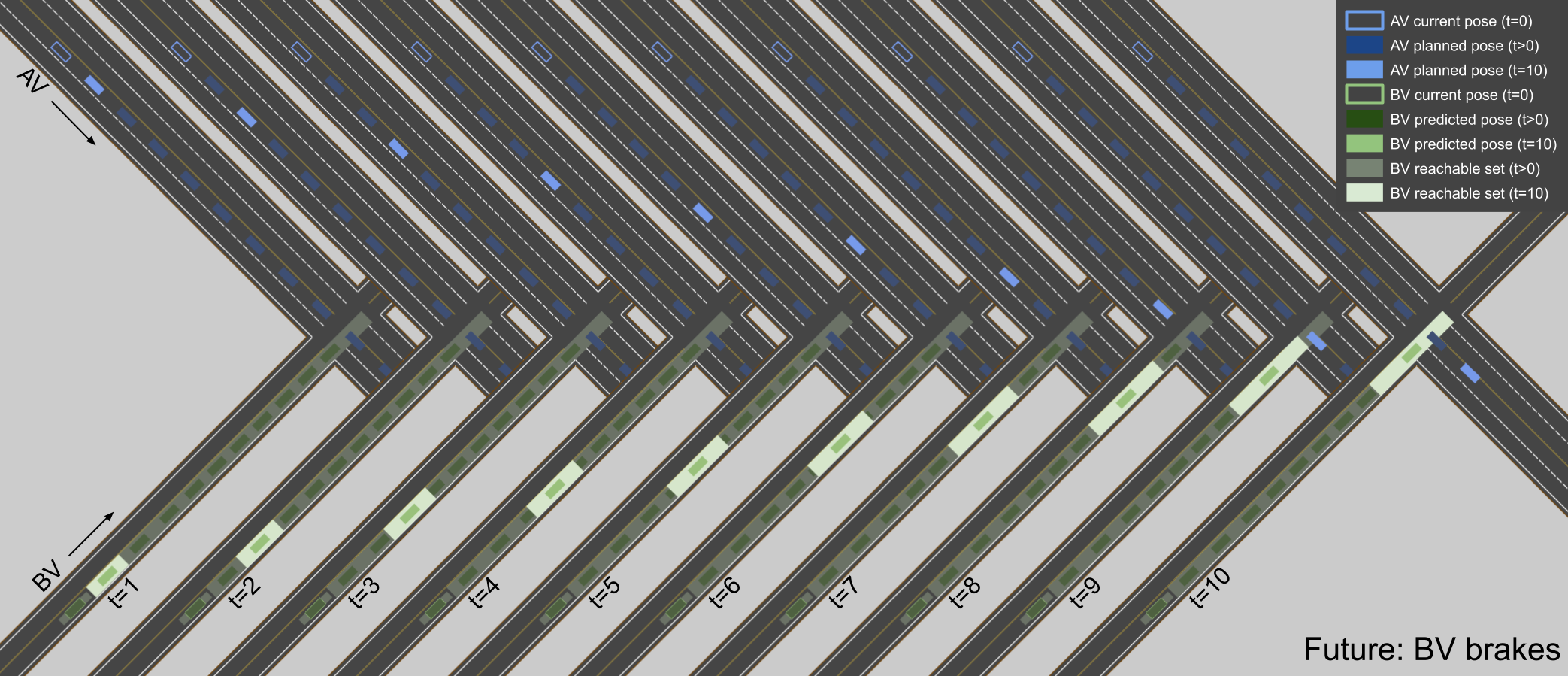
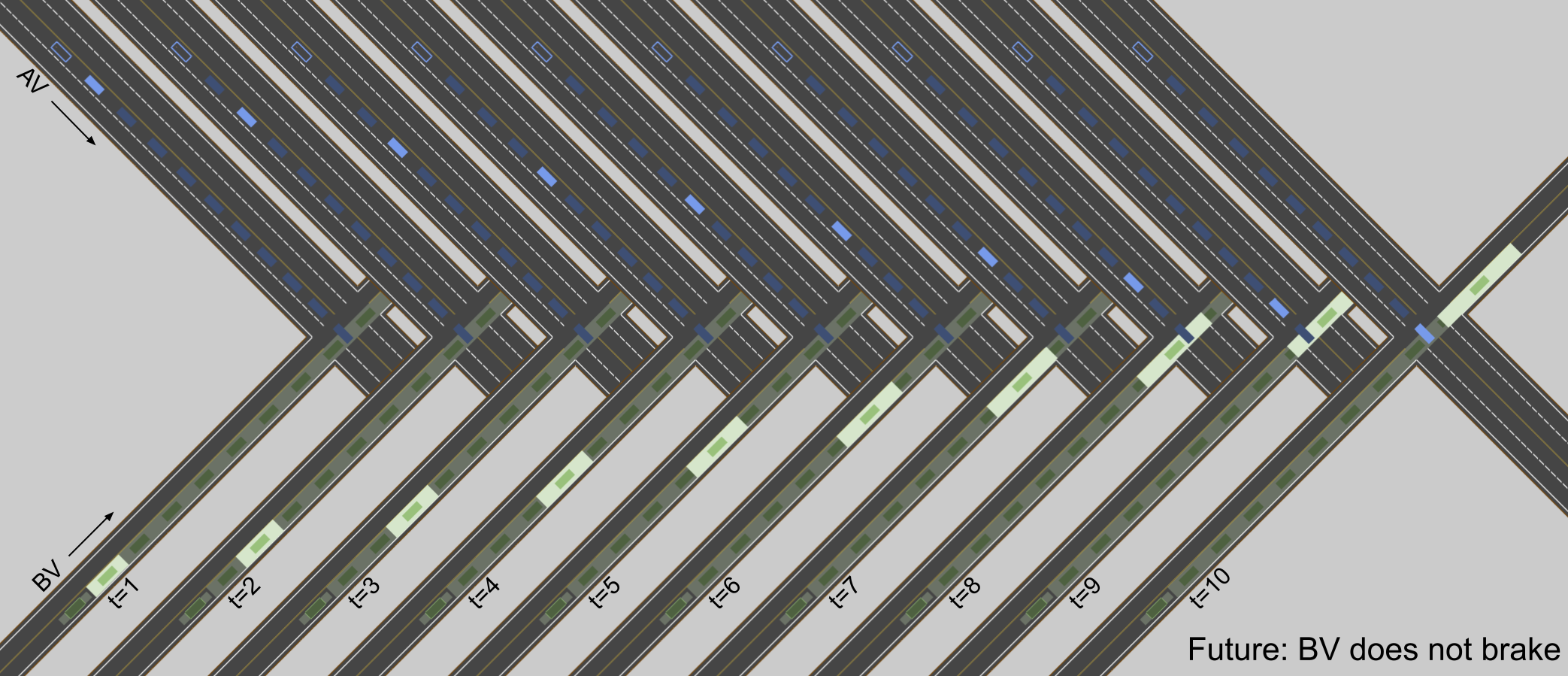
Figure 3: RILQR strategy in a crossing scenario variation, at a planning iteration 3 seconds into the simulation. The future where the BV brakes (and thus the AV proceeds) is shown on the top; the future where the BV does not brake (and thus the AV yields) is shown on the bottom.
Implications and Future Research
The CRS framework and RILQR algorithm pave the way for more adaptable and intelligent motion planning in autonomous driving. By shifting the focus from fixed trajectory planning to dynamic strategic planning, AVs can effectively handle complex and uncertain environments. This paradigm shift opens several avenues for future research, including the development of more sophisticated prediction models that can accurately branch future scenarios based on real-time data, and integrating decision-making processes that are more aligned with human-like driving behaviors.
Conclusion
The research presented in "Comprehensive Reactive Safety: No Need For A Trajectory If You Have A Strategy" challenges the traditional paradigms of autonomous vehicle planning by introducing strategic frameworks that capitalize on future state predictions. The demonstrated success of RILQR in controlled simulations underscores the potential for CRS to enable safer and more robust autonomous driving systems. Future endeavors could further refine these methods, fostering a deeper understanding of strategic planning in autonomous systems and ultimately enhancing their real-world applicability.

