- The paper proposes a hierarchical control framework achieving longitudinal string stability with an H-infinity feedback controller and flexible lateral planning using an APF-based MPC.
- It demonstrates robust performance in simulations addressing time-varying communication delays (50-150ms) and complex scenarios such as merging and obstacle avoidance.
- Experimental HIL validation confirms real-time capability with an average computation time of 1.1 ms, ensuring enhanced safety and efficiency in platooning.
A Holistic Robust Motion Controller Framework for Autonomous Platooning
The paper presents a framework for enhancing the safety and efficiency of autonomous vehicle platoons. This framework focuses on handling challenges such as time-varying V2V communication delays and sudden obstacle appearances, which affect both the longitudinal string stability and lateral control operations of platooned vehicles.
Framework Design
At the core of the proposed framework is a hierarchical architecture that empowers autonomous platoons with robust control mechanisms. The framework is divided into two layers:
- Upper-Level Coordination Layer (UCL): Utilizes an H-infinity feedback controller to maintain the longitudinal string stability of the platoon under conditions of time-varying communication delays and disturbances.
- Lower-Level Motion-Planning Layer (LML): Implements an Artificial Potential Field-based Model Predictive Control (APF-based MPC) to achieve asynchronous lateral motion planning, considering multi-objective constraints related to vehicle dynamics and obstacle avoidance.
This structure effectively integrates robust longitudinal control with flexible lateral motion planning to address complex driving scenarios (Figure 1).
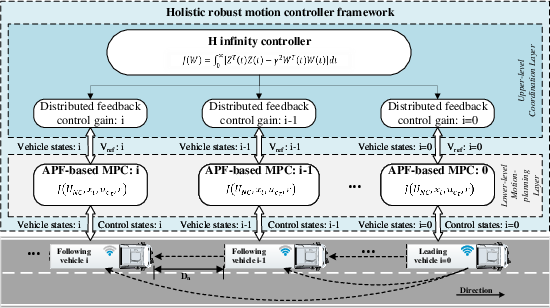
Figure 1: Overall structure of the holistic robust motion controller framework for autonomous platooning.
Critical Scenarios and Case Studies
Three critical driving scenarios were simulated to demonstrate the efficacy of the proposed framework:
- Platooning under Time-Varying Communication Delays: The framework successfully maintained string stability even when communication delays varied between 50-150ms, allowing the position and velocity errors to converge asymptotically (Figures 3, 4, 5, and 6).

Figure 2: Platooning scenario under time-varying communication delay.
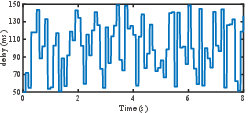
Figure 3: The time-varying delay in V2V communication.
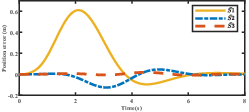
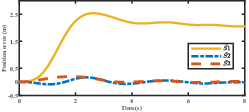
Figure 4: Position error: (a) without delay and (b) with time-varying delay.
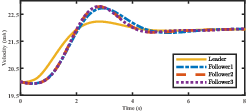
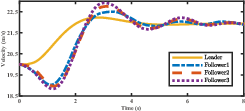
Figure 5: Velocity: (a) without delay and (b) with time-varying delay.
- Merging Scenario: Featuring an obstacle vehicle splitting the platoon, it highlighted the framework’s capability to ensure safe and efficient lane transitions and obstacle avoidance (Figures 7, 8, 9, and 10).
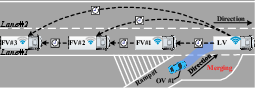
Figure 6: Merging scenario with an obstacle vehicle splitting platoon under time-varying communication delay.
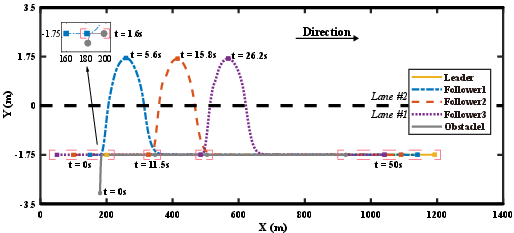
Figure 7: Movement of the platoon in merging scenario.
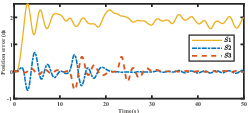
Figure 8: Position error of the platoon in merging scenario.
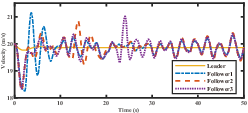
Figure 9: Velocity of the platoon in merging scenario.
- Obstacle Avoidance: The scenario highlighted how the platoon navigated through blocked roads, where each vehicle executed independent and coordinated maneuvers to ensure safety (Figures 11, 12, 13, 14, 15, and 16).

Figure 10: Obstacle avoidance scenario with critical blocking moment under time-varying communication delay.
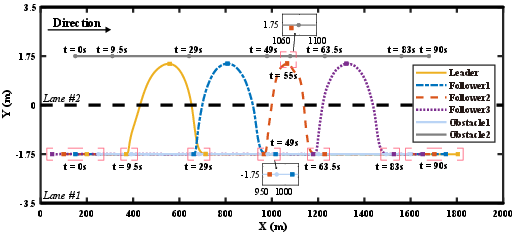
Figure 11: Movement of the platoon in obstacle avoidance scenario.
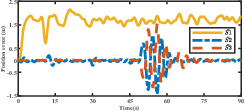
Figure 12: Position error of the platoon in obstacle avoidance scenario.
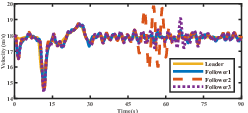
Figure 13: Velocity of the platoon in obstacle avoidance scenario. The fluctuation of Follower 2 at 49s is due to trade-off between the driving safety and string stability.
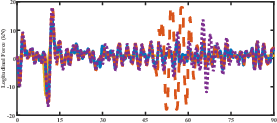
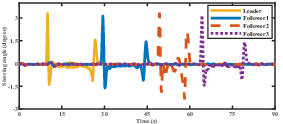
Figure 14: Longitudinal force and steering angle commands in obstacle avoidance scenario.
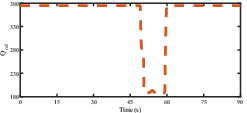
Figure 15: Qref in obstacle avoidance scenario.
Experimental Verification
The framework's robustness and real-time capability were further validated through a Hardware-in-the-Loop (HIL) simulation using a Speedgoat real-time target machine. The HIL results confirmed the framework's practicability and its ability to maintain stability and safety under realistic conditions, with an average computation time of 1.1 milliseconds (Figures 18, 19, and 20).
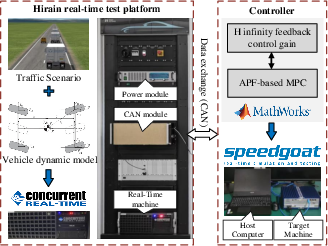
Figure 16: Hardware-in-the-loop platform.
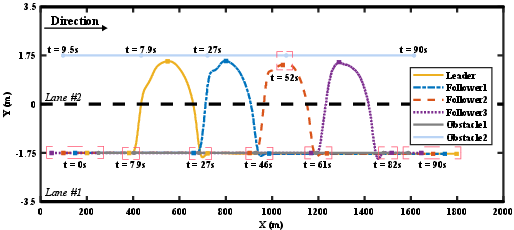
Figure 17: Movement of the platoon in HIL experiment.
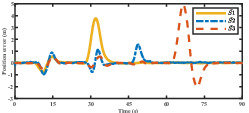
Figure 18: Position error of the platoon in HIL experiment.
Conclusion
The proposed holistic robust motion controller framework demonstrates significant improvements in managing the dynamics of autonomous platoons, particularly under challenging driving conditions such as time-varying communication delays and obstacle avoidance. Its hierarchical structure ensures efficient integration of different control objectives, emphasizing scalability and adaptability to various road environments. Future work will focus on expanding the framework to incorporate additional robust control strategies and further validating its performance through real-world testing.