- The paper introduces a dynamic programming-based method to optimize eco-driving trajectories for heterogeneous CAV platoons.
- Simulation results demonstrate trade-offs between travel time and energy consumption across different optimization scenarios.
- The study integrates PID-based CACC with dynamic programming, enabling real-time control using traffic signal data for improved urban mobility.
Eco-driving Trajectory Planning of a Heterogeneous Platoon in Urban Environments
This paper presents a novel Eco-driving trajectory planning strategy for a heterogeneous platoon of connected and autonomous vehicles (CAVs) navigating urban environments. It introduces a dynamic programming (DP) based control strategy that balances energy consumption, mobility, and passenger comfort, enabling vehicles to traverse signalized intersections without halting.
Introduction to Eco-CACC in Urban Environments
The evolution of connected and autonomous vehicle technologies has paved the way for innovations in eco-driving and platooning strategies, targeting enhanced fuel efficiency and reduced emissions. The proposed study extends these innovations to urban environments, where CAVs must navigate complex traffic patterns including signalized intersections. Central to this research is the integration of cooperative adaptive cruise control (CACC) with eco-driving techniques for a platoon of heterogeneous electric vehicles (EVs), considering both passenger comfort and energy consumption.
The proposed architecture aims to optimize the trajectory of a platoon's leader vehicle by employing dynamic programming, taking into account traffic signal timing information available through V2I communication (Figure 1).
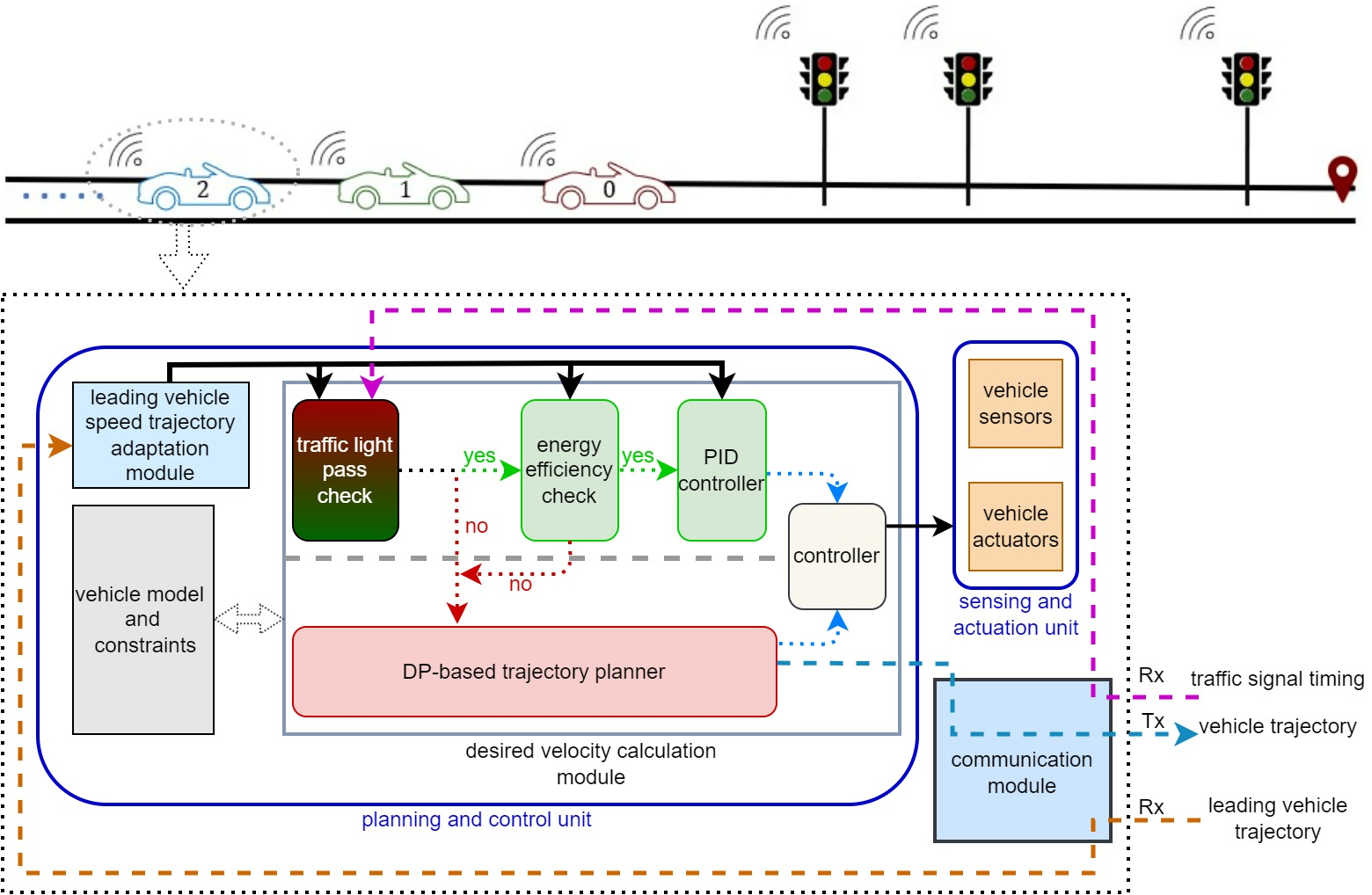
Figure 1: Diagram of the proposed Eco-CACC design. A platoon navigation method for multiple CAVs through urban intersections using DP for trajectory planning.
System Model and Vehicle Dynamics
The system model assumes longitudinal control of CAVs in a platoon navigating an urban arterial marked by several signalized intersections. This model embraces a simplified longitudinal vehicle dynamics framework anchored on the vehicle's mass, velocity, traction force, and resistance components such as aerodynamic and rolling resistance. These facets establish the basis for the power-based energy consumption model integral to optimizing vehicle trajectories over the designated urban route.
Dynamic Programming and PID-based CACC Integration
The trajectory planning for leader vehicles employs a dynamic programming formulation to resolve an optimization problem aimed at balancing energy consumption, mobility, and passenger comfort. The optimization considers constraints such as acceleration limits, vehicle speed bounds, and road speed limits. The trajectory is delineated through distance-based segments where the state variables encompass velocity and time, and acceleration emerges as the control variable.
Subsequently, following vehicles adopt a PID-based cooperative adaptive cruise control (CACC) scheme to maintain the prescribed inter-vehicle gaps set by the time headway constant and standstill distance, leveraging the reduced computational burden of PID over DP for real-time applications (Figure 2).
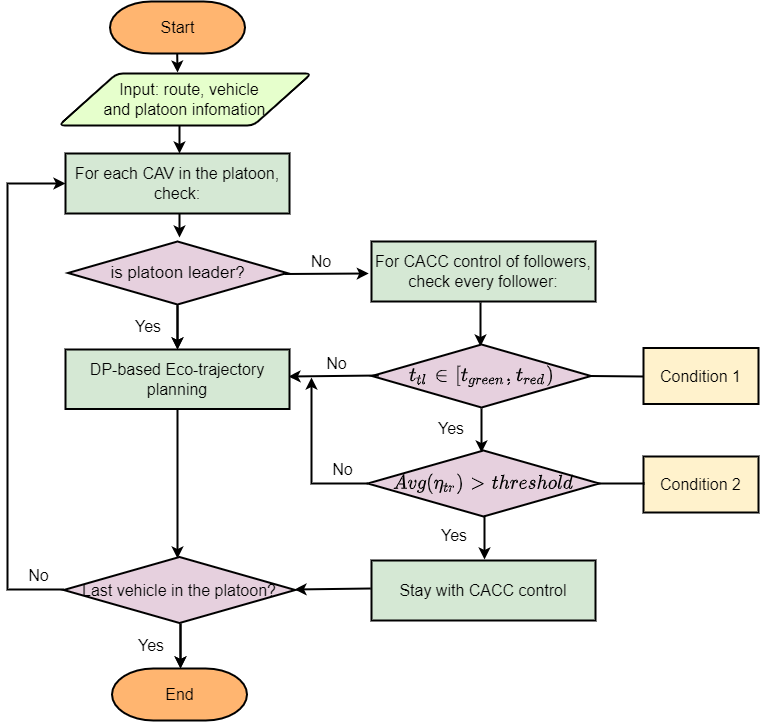
Figure 2: The proposed control strategy for a heterogeneous platoon in urban environments.
Simulation Results
Simulations encompass multiple scenarios wherein the proposed Eco-CACC framework is scrutinized for varied optimization objectives. Scenario I primarily targets mobility and passenger comfort, leading to optimized travel times but at the cost of increased energy consumption across certain vehicle types. Conversely, Scenario II integrates energy consumption into the objective function, resulting in reduced energy expenditure albeit with a proportionally increased travel time.
(Figure 3 and Figure 4)
Figure 3: Eco-driving trajectory planning of heterogeneous platoon in Scenario I.
Figure 4: Energy consumption for each vehicle through the urban route in Scenario I.
(Figure 5 and Figure 6)
Figure 5: Eco-driving trajectory planning of heterogeneous platoon in Scenario II.
Figure 6: Energy consumption for each vehicle through the urban route in Scenario II.
Comparison of Scenarios
Scenario I prioritizes rapid transit with an average traveling time of 234.86 s/vehicle and displays higher energy usage due to neglecting energy optimization in DP. Scenario II achieves energy reductions by 339 Wh/vehicle compared to Scenario I, at the expense of a 30% increase in travel time (approximately 71 seconds per vehicle), demonstrating the trade-off facilitated by the proposed Eco-CACC strategy.
Conclusion
The study introduces a robust Eco-CACC strategy designed to enhance urban traffic efficiency for heterogeneous EV platoons. By leveraging dynamic programming alongside PID-based CACC, the methodology accommodates real-time decision-making under varying traffic conditions while optimizing for energy efficiency, mobility, and passenger comfort. The strategic integration of traffic signal phase and timing information provides a framework that anticipates future developments in intelligent urban traffic management systems, poised to bolster the sustainability and efficiency of urban transport networks.
Although the outlined approach achieves impressive energy savings and mobility enhancements, it illustrates oscillatory acceleration profiles in scenarios void of passenger comfort constraints. Future research could explore further refinements in CACC algorithms and control strategies to ameliorate this oscillatory behavior and enrich the adaptability of CAV platoons in diversified urban scenarios.

