- The paper demonstrates a novel greedy voxelised cost optimisation approach tailored to adjust robot gaze for effective collision avoidance.
- The method integrates GPU-based real-time evaluation of camera motion primitives, achieving improved exploration rates in both 2D and 3D environments.
- Real-world validation on a Toyota HSR confirms enhanced re-planning and dynamic obstacle handling in complex, dynamic settings.
Optimized Gaze Control for Whole-Body Collision Avoidance
The paper "Where Should I Look? Optimised Gaze Control for Whole-Body Collision Avoidance in Dynamic Environments" addresses the novel challenge of determining optimal head camera positioning for mobile robots to enhance collision avoidance and map exploration in dynamic settings. The authors propose a greedy optimisation method leveraging voxelised rewards and demonstrate its effectiveness in both 2D and 3D environments.
Introduction and Problem Statement
The focus is on active gaze control in motion planning, particularly for robots equipped with movable cameras, such as the Toyota Human Support Robot (HSR). Traditional methods often limit perception with fixed camera positions, impeding motion planning in dynamic environments. The problem addressed is the continuous adjustment of a robot's gaze to optimize obstacle perception and trajectory planning, accounting for constantly changing surroundings.
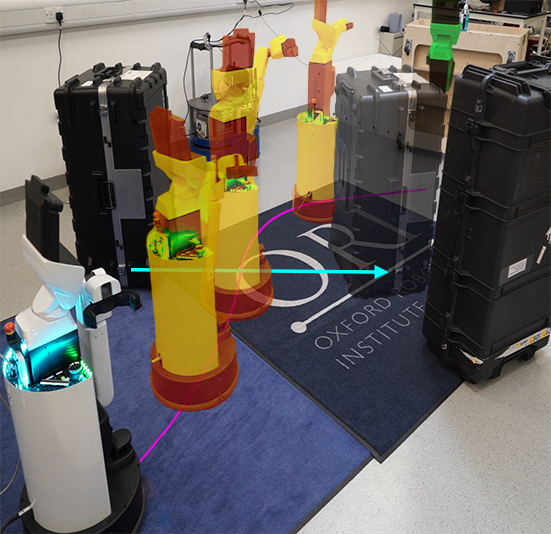
Figure 1: Using our method of active gaze control, a Toyota Human Support Robot successfully avoided dynamic obstacles, ensuring effective real-time re-planning.
Gaze control has historically been addressed in the context of the Next-Best View (NBV) problem, where the objective is to maximize informational gain for environmental reconstruction. This work diverges by focusing on gaze strategies constrained by the robot’s trajectory, aiming not just for information gathering but for collision-avoidance in real-time exploratory tasks.
Methodology: Greedy Voxelised Cost Optimisation
The proposed method comprises a two-part strategy involving reward assignment and optimisation over camera motion primitives.
Reward Assignment
Rewards are voxel-based, favoring spaces critical for collision-free trajectory execution. Rewards are tiered temporally to prioritize immediate trajectory regions and correspond with the dynamic adjustment of what areas need refreshing observations.
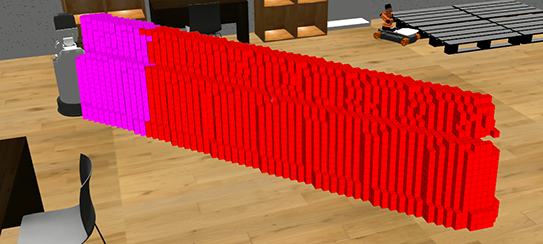
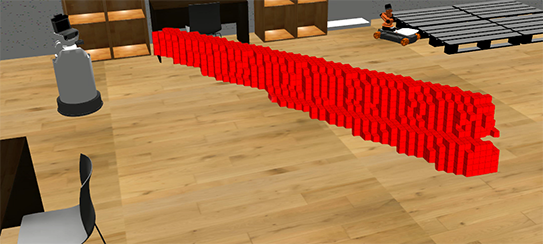
Figure 2: Visualisation of the prioritization strategy in swept trajectory rewards, emphasizing near-term trajectory visibility.
Optimisation
By evaluating a predefined set of local motion primitives, the approach uses a greedy algorithm to maximize the reward. The framework integrates efficiently with GPU-based perception systems to ensure real-time adaptability at typical operational frequencies (~4.9Hz), crucial for dynamic environments.
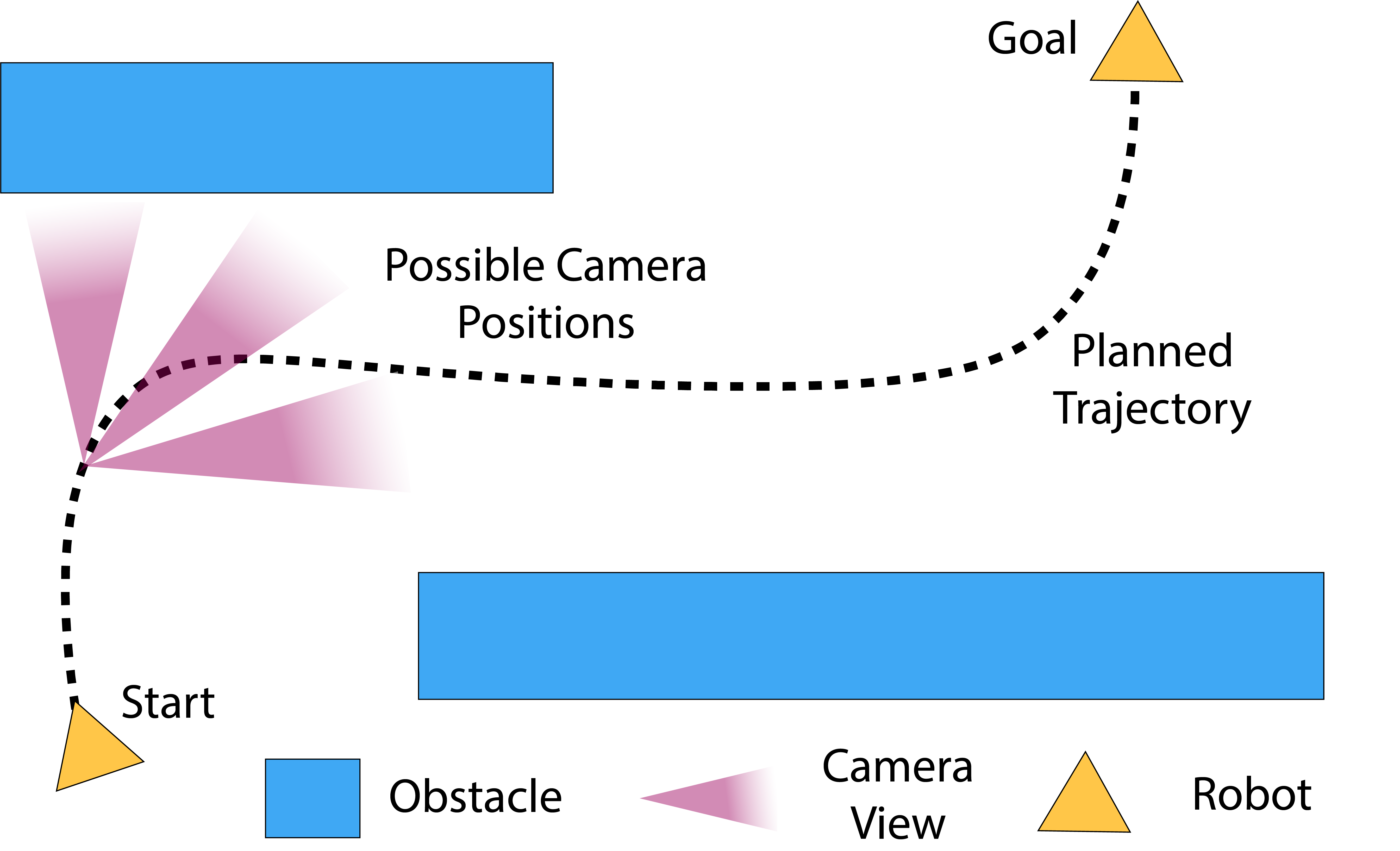
Figure 3: Dynamic task representation, highlighting camera placement for optimal collision avoidance.
Experimental Setup and Evaluation
Benchmarking was conducted in a range of simulated environments to assess both collision-free trajectory achievement and workspace exploration efficacy.
2D Environments
Analysis of 2D scenarios showcased the proposed method’s superior success rate and exploration compared to heuristic approaches like Static and Panning gaits, achieving a significantly improved map area perception.
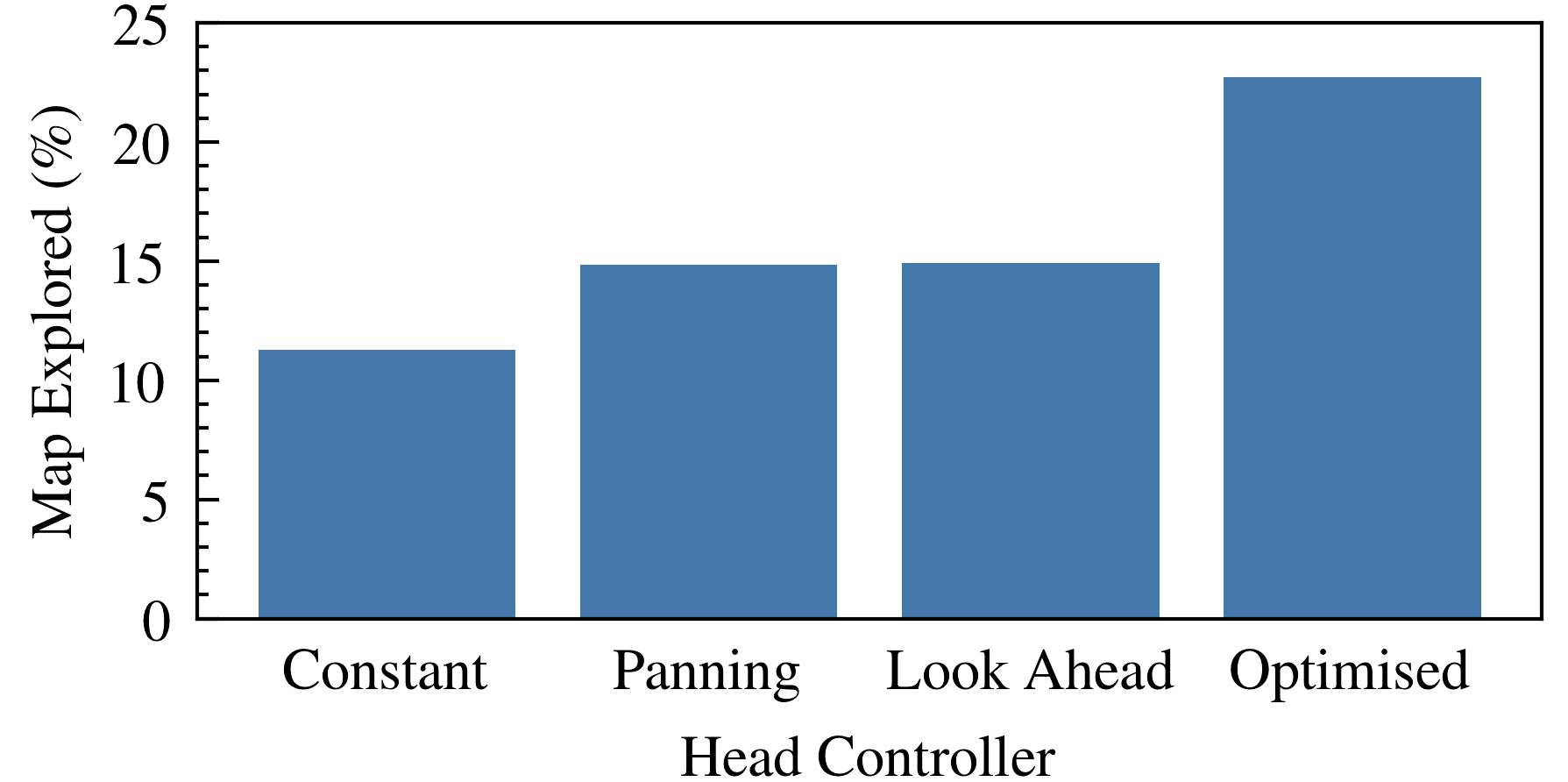
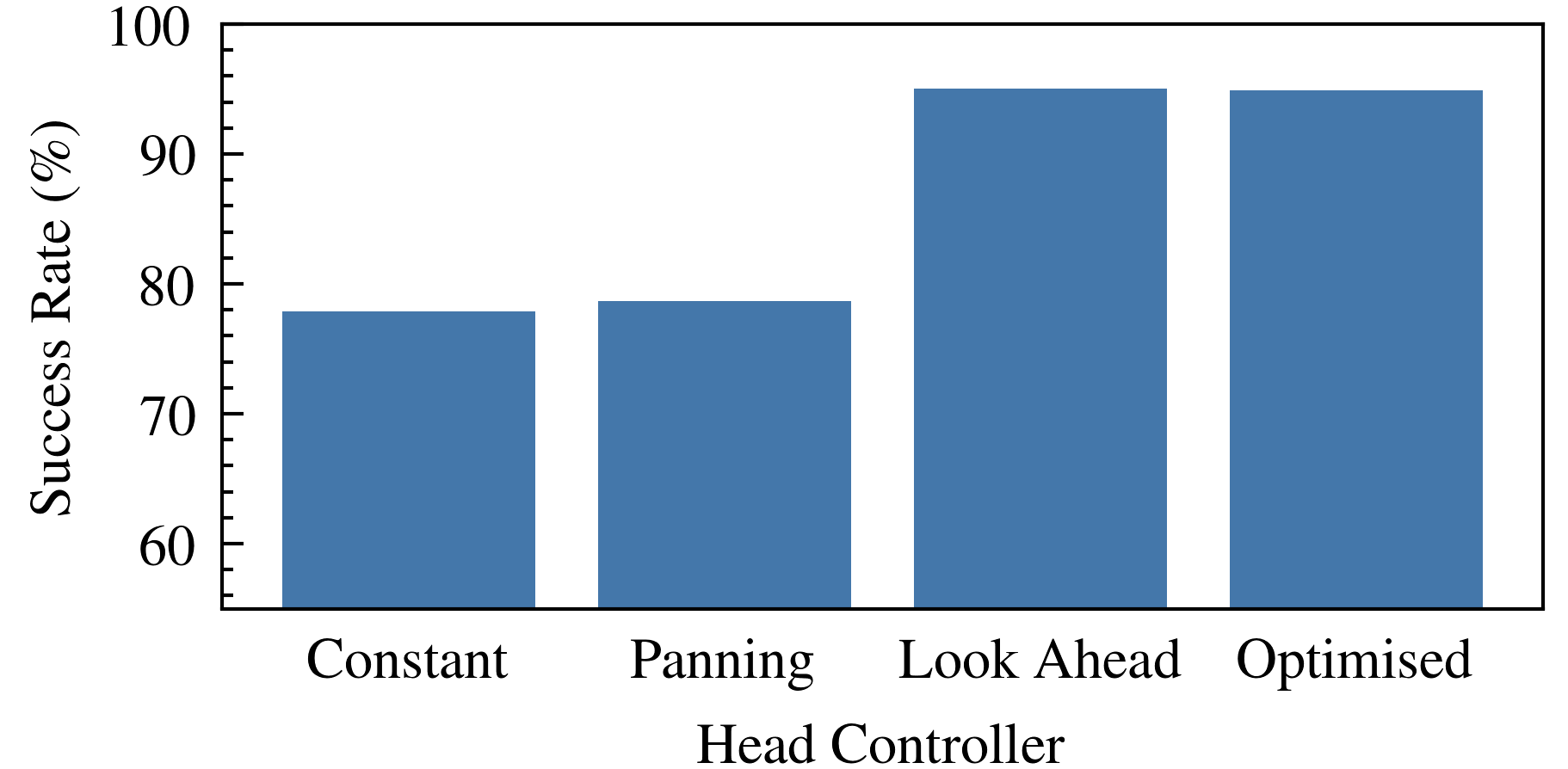
Figure 4: Comparative evaluation of gaze behaviors demonstrating the optimized method’s proficiency in environmental exploration.
3D and Dynamic Environment Testing
In 3D scenarios, the Optimized gaze control provided increased success rates and thus demonstrated robustness, even outperforming baselines in obscured settings and reliably handling dynamic obstacles in simulated models.
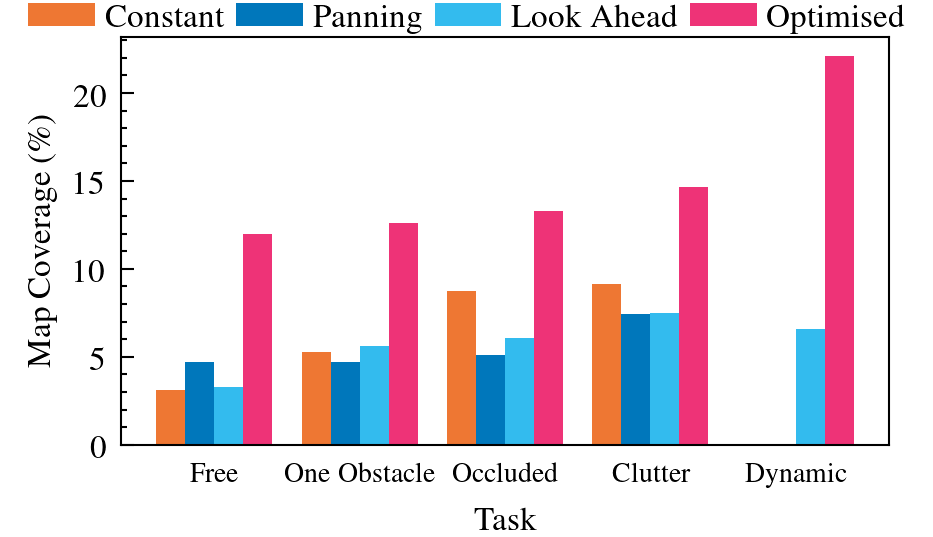
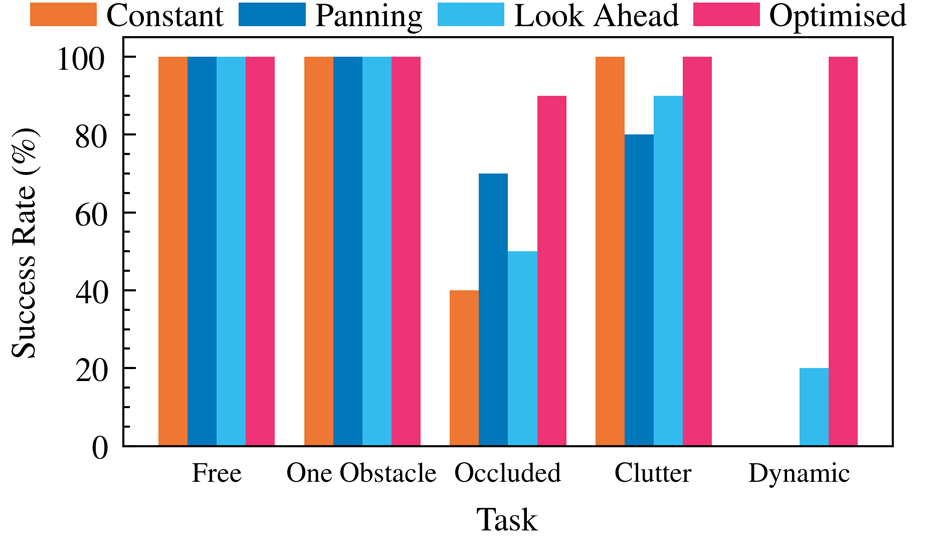
Figure 5: Success rate and exploration gains in static and dynamic simulations, illustrating the superiority of the Optimized method.
Real-World Application and Hardware Validation
The deployment on a physical Toyota HSR validated the method’s practical applicability, confirming real-time efficacy in navigating and adapting to unforeseen environmental changes.
Discussion
While optimizing gaze control over longer horizons remains a potential area for future enhancement, the proposed method offers a reliable framework for immediate trajectory-constrained gaze decision-making. Potential improvements may involve machine learning techniques to refine reward allocation and optimize head movements further.
Conclusion
The authors successfully illuminate a novel approach to robot gaze control in dynamic environments through a targeted optimization strategy, demonstrating substantial efficacy in collision avoidance and map exploration. This approach presents a paradigm shift in how robots can navigate complex, unforeseen scenarios, ensuring higher operational safety and adaptability.
In essence, the methodology provides a solid foundation upon which future work could build, potentially leveraging more advanced computational models to further refine the gaze optimization process.

