- The paper introduces a novel flexible lane direction approach based on multi-vehicle formation control for dynamic traffic management.
- It employs an Iterative Grouping Algorithm and bi-level formation control, demonstrating significant gains in throughput and travel time reduction in simulations.
- The results indicate that the flexible lane method outperforms traditional fixed-lane and signalized strategies, offering practical insights for smart intersection design.
Introduction
The paper "Multi-lane Unsignalized Intersection Cooperation with Flexible Lane Direction based on Multi-vehicle Formation Control" addresses the challenge of managing traffic flow at unsignalized intersections. Traditional approaches often rely on fixed lane directions, which can result in inefficiencies due to fluctuating traffic volumes and varying vehicle turning behaviors. This research presents a method that leverages flexible lane direction and multi-vehicle formation control for improving traffic efficiency.
Framework and Methodology
Scenario Description
The primary focus is on unsignalized intersections accommodating three types of vehicle movements—right-turning, straight-going, and left-turning—across multiple lanes. A key innovation in this research is the implementation of flexible lane directions wherein each lane can be designated for any type of turning based on current traffic demands. Such flexibility aims to optimize lane usage dynamically.
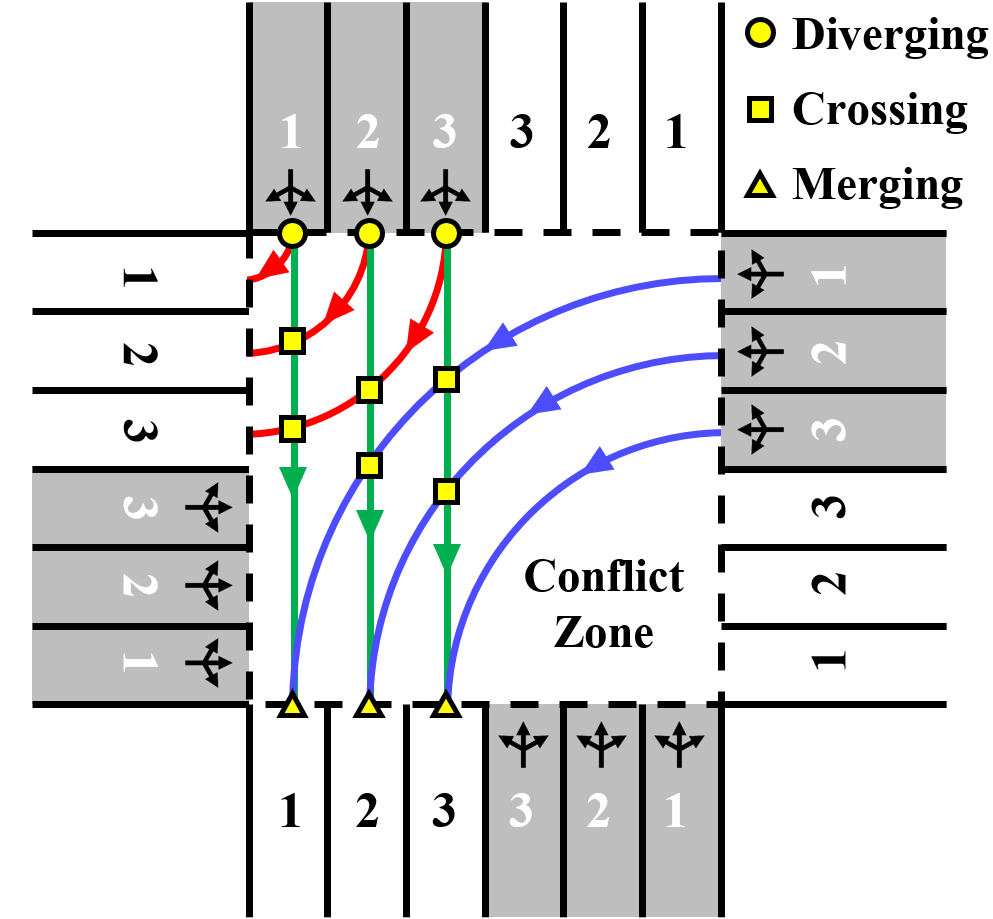
Figure 1: A three-lane intersection where variable turning is allowed for all the incoming lanes.
Conflict-Free Distribution Calculation
A major contribution of the paper is the "Iterative Grouping Algorithm" (IGA), which calculates the optimal distribution of vehicles to pass through the conflict zone safely. Conflict matrix-based scheduling ensures that vehicles with potential crossing, diverging, and merging conflicts are arranged in layers, enabling simultaneous passage for those without conflicts.

Figure 2: A sequence of ten incoming vehicles. The numbers are ID of vehicles and their traffic movements are shown in the black rectangles. Vehicles with the smaller ID are closer to the stop line of the intersection.
The formation reconfiguration method is employed to manage lane changes and positional adjustments in a collision-free manner. The paper introduces a bi-level formation control framework that facilitates trajectory planning within a Relative Coordinate System (RCS) for efficient vehicle movement planning. This relative motion planning leverages Conflict-Based Search (CBS) algorithms to resolve conflicts and determine optimal paths for vehicles.
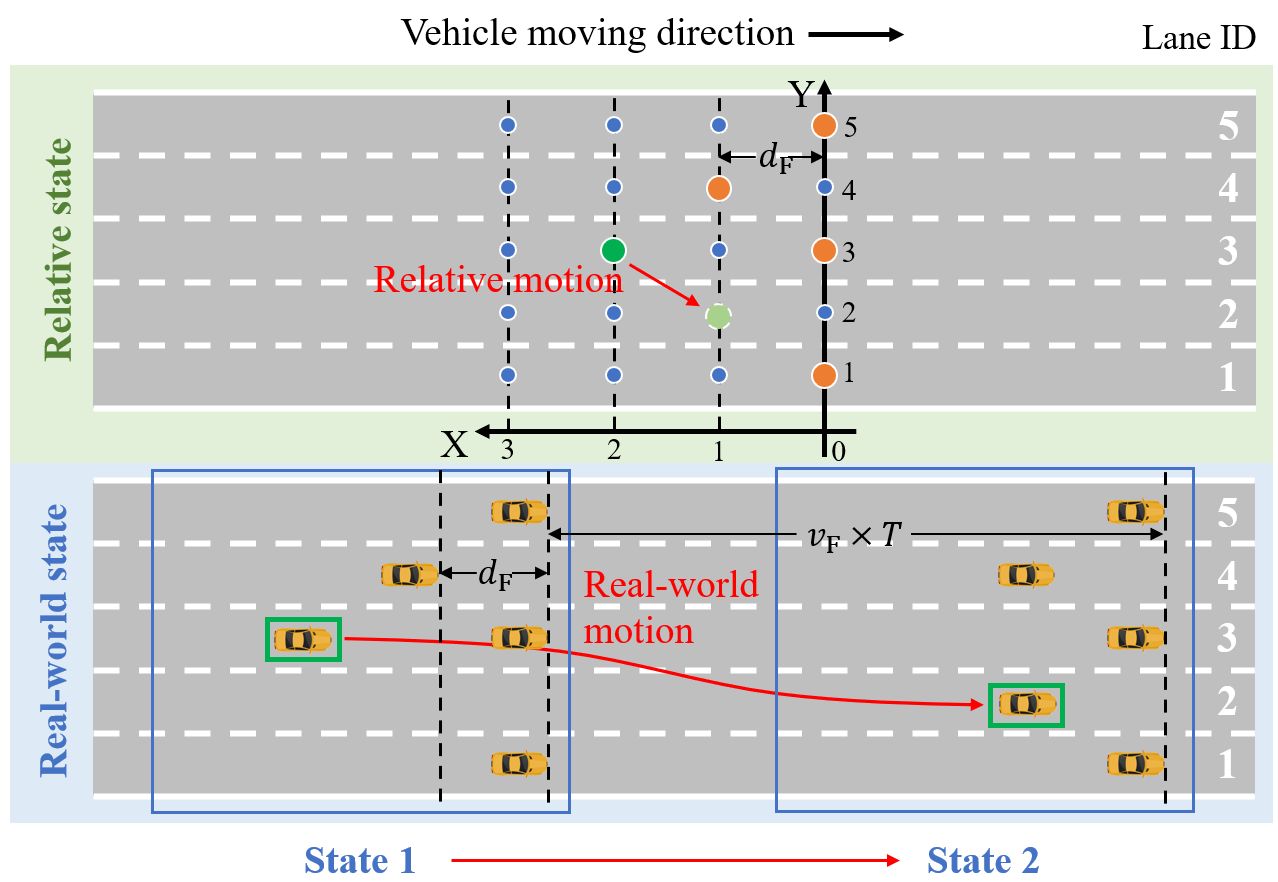
Figure 3: The bi-level formation control framework.
Simulation and Results
The paper presents simulations conducted under varying traffic volumes and vehicle turning proportions. Results indicate that the proposed flexible lane method significantly outperforms both fixed-lane unsignalized and signalized intersection strategies. Key metrics include average travel time reduction and increased throughput, highlighting the method's ability to utilize intersection capacity more effectively.
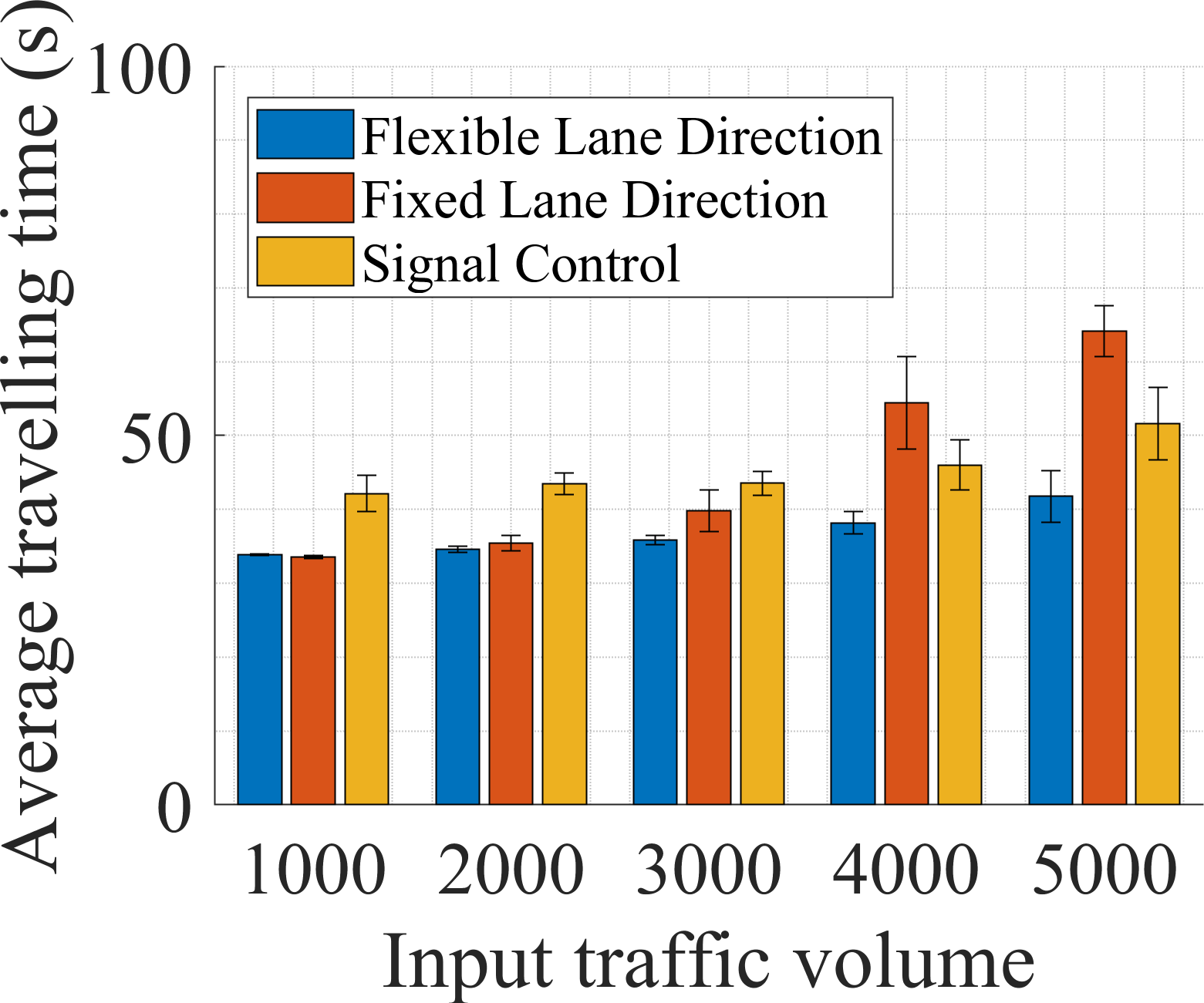
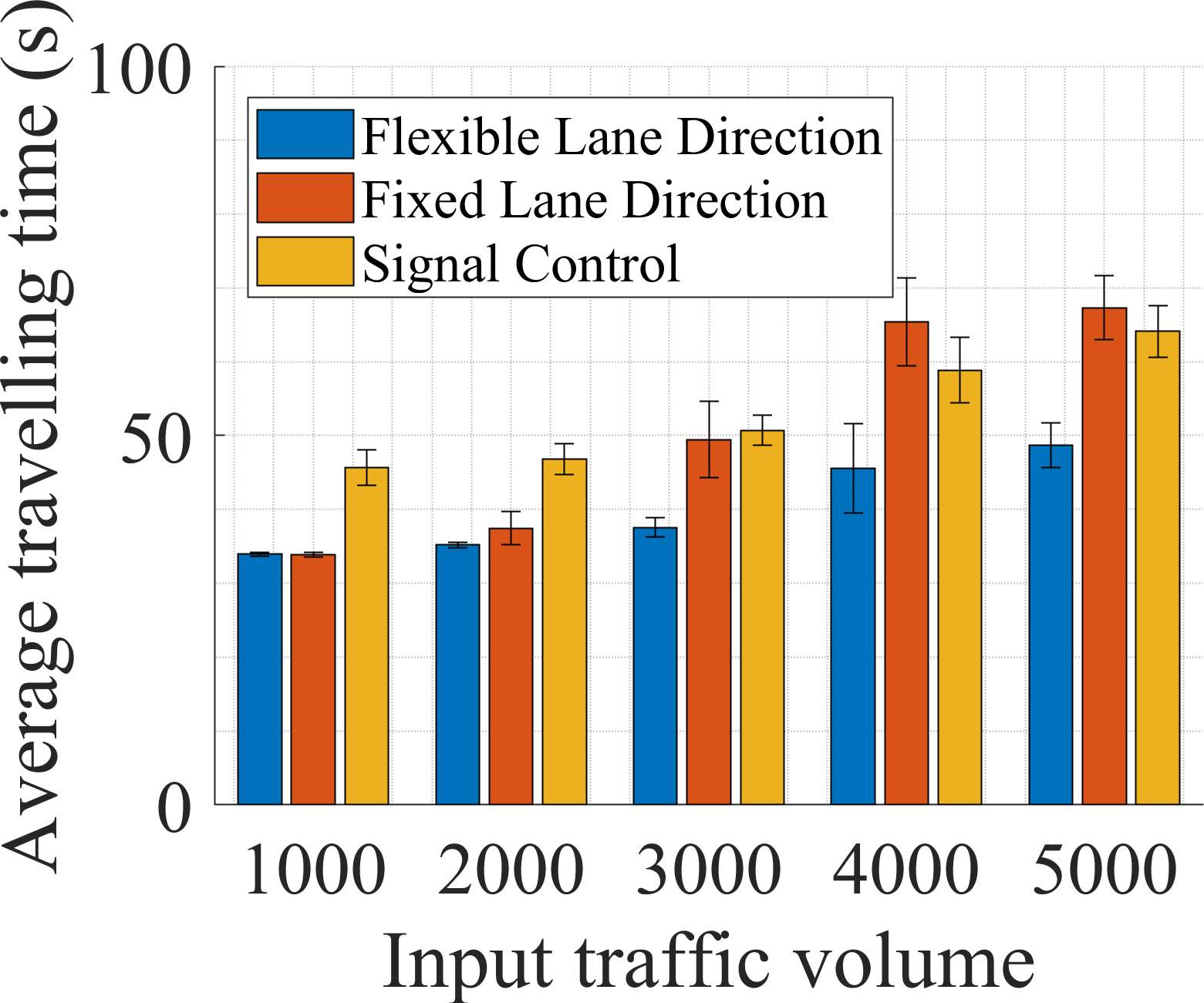
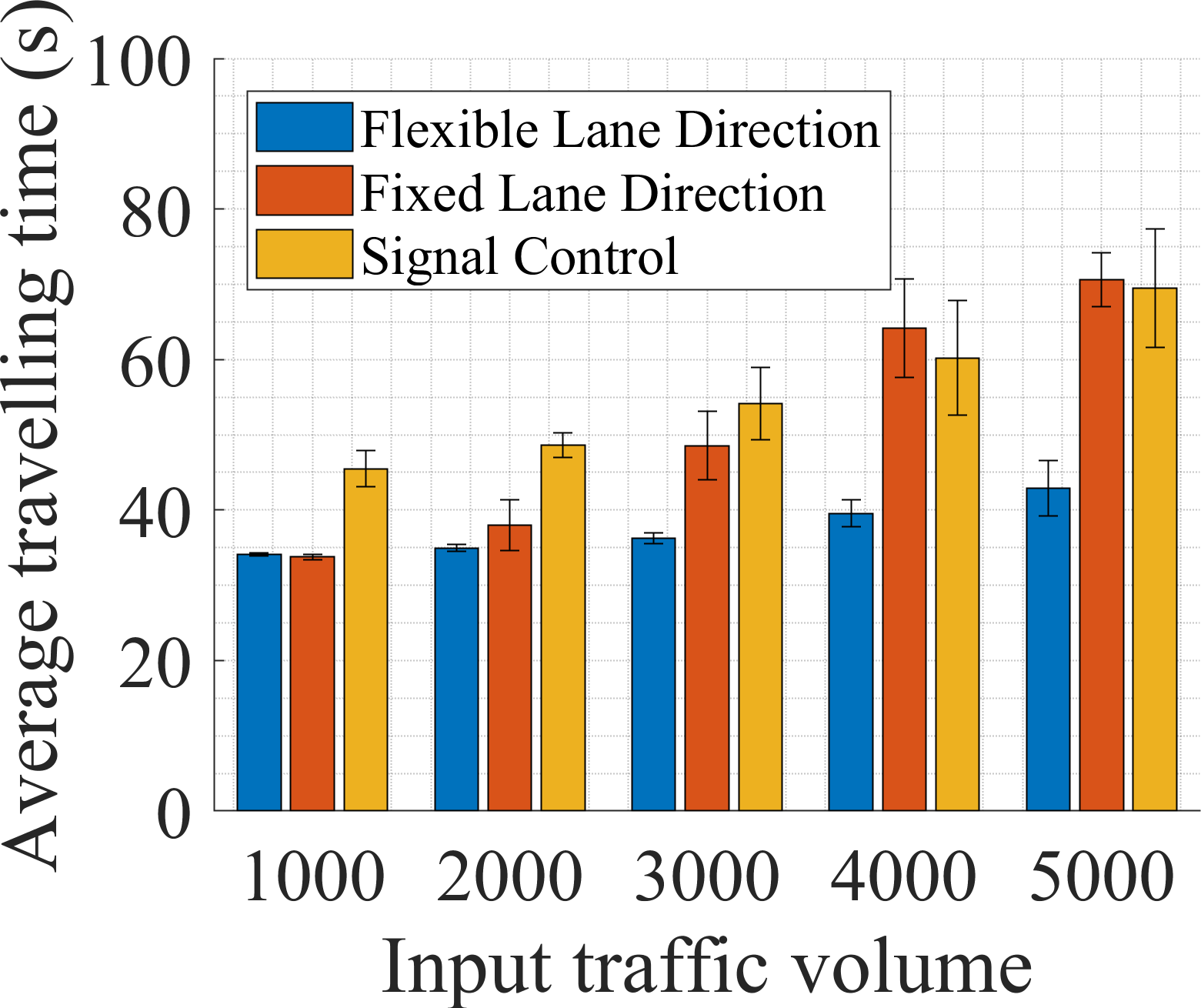
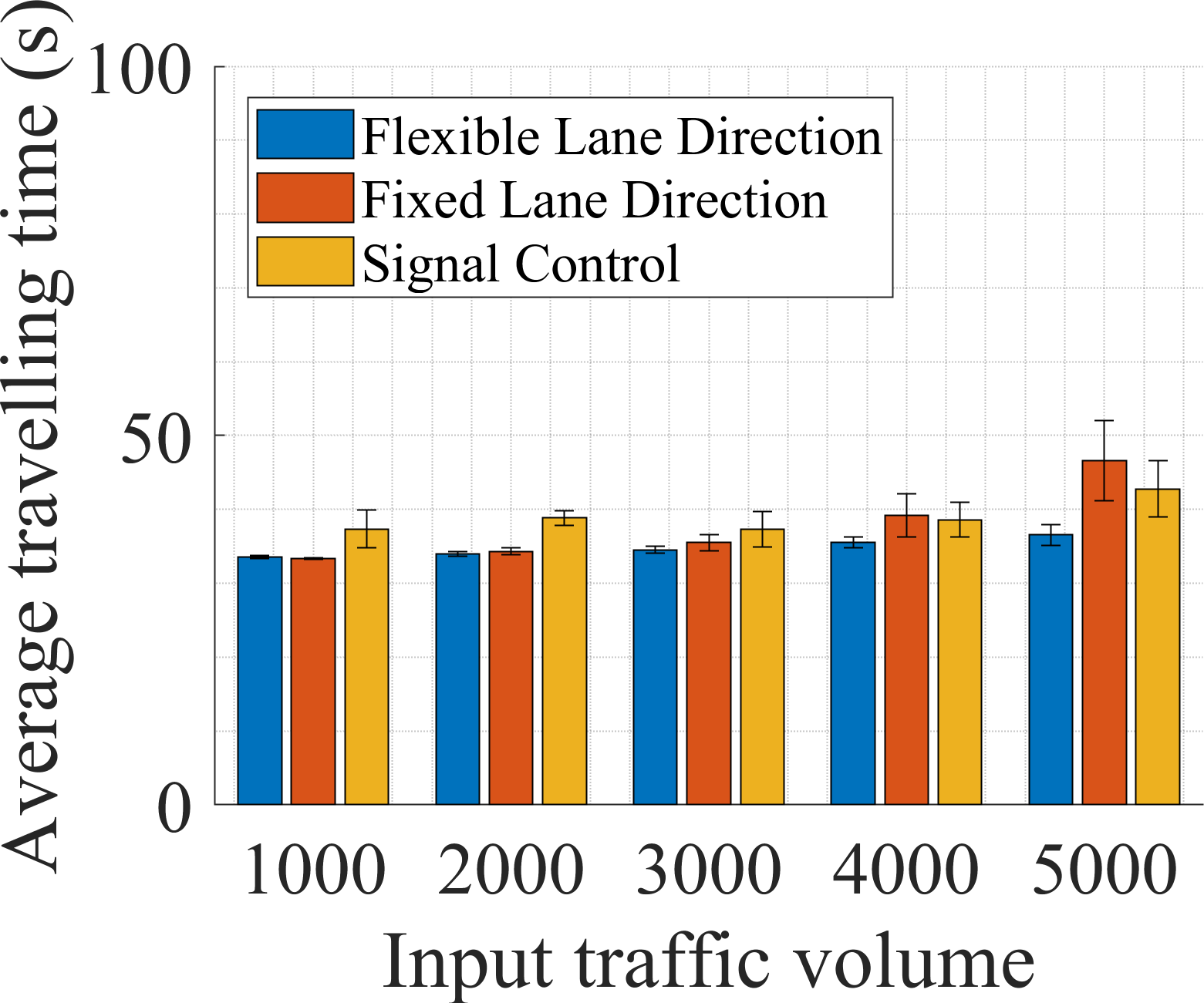
Figure 4: Results of average travelling time of vehicles.
Furthermore, this dynamic method allows more vehicles to traverse the conflict zone simultaneously, showcasing its superior efficiency compared to conventional methods, particularly in high-density traffic scenarios.
Conclusion
The proposed multi-lane unsignalized intersection cooperation method introduces a promising approach to intelligent traffic management by removing fixed lane constraints and dynamically optimizing vehicle throughput via formation control. Its implications extend to real-world applications where adaptive traffic systems are crucial for urban mobility challenges. Future work may explore integration with real-time traffic monitoring and adaptive algorithms for broader deployment across diverse traffic scenarios.

