- The paper introduces a flow-aware platoon organization strategy that balances longer CAV platoon formation with minimal traffic disruption at low market penetration.
- It employs calibrated microscopic traffic models and sensitivity analyses to validate the approach using realistic freeway network simulations.
- Simulation on State Route 99 confirms that conditional platoon formation enhances traffic capacity by controlling lane changes and optimizing flow.
Introduction to Cooperative Adaptive Cruise Control and CAVs
The advancement of Cooperative Adaptive Cruise Control (CACC) technology provides a promising avenue for enhancing road traffic capacity and energy efficiency without necessitating substantial investment in infrastructure such as new lanes or ramp metering systems. Vehicles equipped with CACC technology, referred to as Connected Automated Vehicles (CAVs), can monitor speed and spacing with adjacent vehicles and automatically adjust based on real-time data received from other CAVs. In this way, CAVs can operate at shorter headways than traditional human-driven vehicles and can potentially increase traffic capacity and decrease air drag [Shladover2012].
However, challenges arise at low market penetrations of CAVs. Sparse dispersion of CAVs appears to reduce opportunities to form long vehicle platoons, thereby limiting potential reductions in traffic stream headway—a crucial factor for boosting capacity. Efforts to address these challenges include exploring strategies for platoon formation that enable CAVs to maneuver, change lanes, accelerate or decelerate, effectively organizing into more extensive platoons (Figure 1).
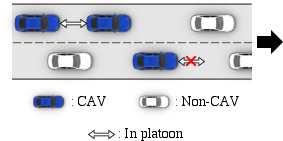
Figure 1: Challenges of CAVs at low penetration.
Impacts of Platoon Organization on Traffic Capacity
Platoon organization strategies can theoretically enhance the number of CAVs travelling in platoons, minimizing headways. Nonetheless, such strategies risk causing increased lane changes, potentially disrupting traffic flow and lowering capacity. Given insights from [Laval2006, Chen2018], the additional lane changes could deactivate CACC modes and exacerbate flow disruptions. As a result, capacities might decline, canceling out the gains achieved by forming longer CAV platoons.
Prior studies exploring dedicated lanes for CAVs have presented varied outcomes. Some investigations [Ghiasi2017, Hua2020] suggest increased capacity without accounting for the adverse effects of lane changes, while others report lowered capacities at low CAV penetration levels due to undersaturation of CAV-only lanes Talebpour2017, Chen2017.
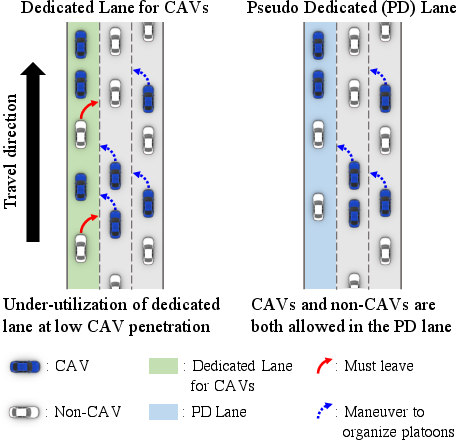
Figure 2: Pseudo Dedicated (PD) Lane.
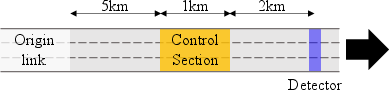
Figure 3: Homogeneous Road Segment.
A critical gap remains in literature regarding understanding whether and how platoon organization impacts traffic capacities in mixed-traffic scenarios. Therefore, optimizing an operation strategy balancing longer platoon formations while ensuring maximal traffic flow becomes pivotal.
Research Methodology and Strategy Development
The research employs microscopic traffic models calibrated with empirical data, as demonstrated in [Liu2018_Modeling], encompassing mixed traffic components and realistic lane change behaviors. The focus is on creating a pseudo dedicated lane strategy fostering platoon formation without undersaturating lanes at low CAV penetration rates (Figure 4).
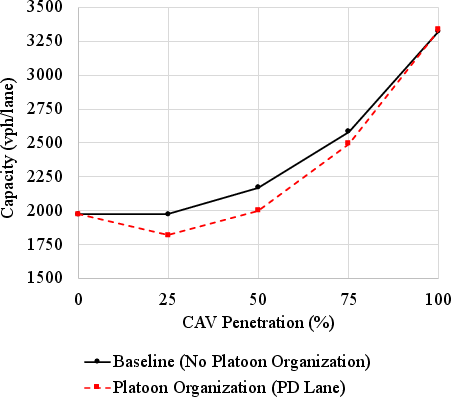
Figure 4: Capacity for varying market penetrations of CAVs.
The sensitivity analysis demonstrates platoon organization induced lane changes enhance platoon formations but also reveal disturbances in flow at higher demands—precipitating capacity drop. Consequently, the study proposes a Flow-Aware platoon organization strategy based on flow and speed thresholds to identify conditions optimal for platoon organization without disrupting traffic capacity.
Validation of Flow-Aware Strategy
The Flow-Aware platoon organization has been validated via simulations on a realistic freeway network—State Route 99, California. Results verify that by deploying flow detectors and executing conditional platoon formations during low-flow conditions, CAVs successfully form longer platoons while maintaining discharge flow parity with baseline conditions (Figure 5, Figure 6, Figure 7).
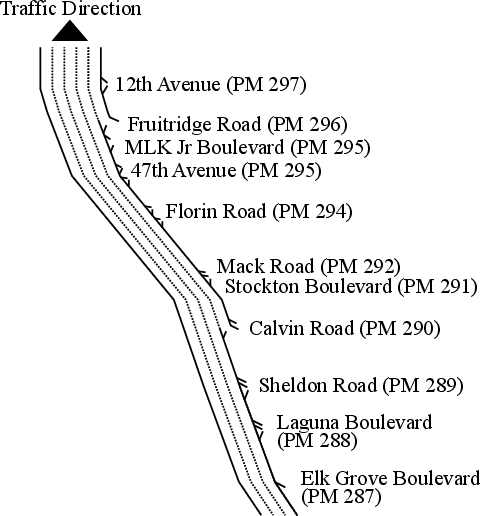
Figure 5: Simulated State Route 99 in Sacramento, California (PM: Post-mile).
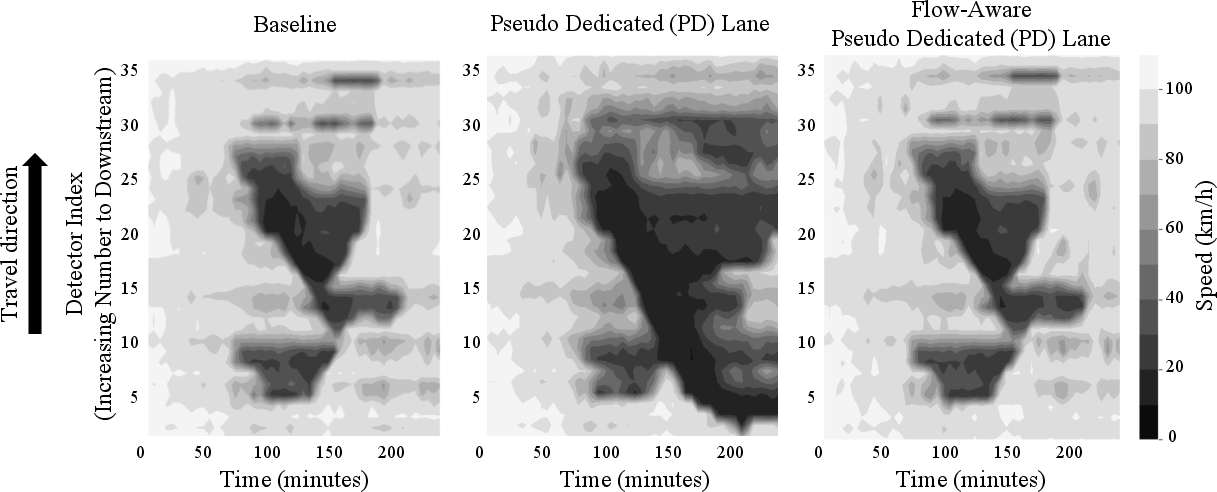
Figure 6: Speed contours (Freeway network in Fig. 5).
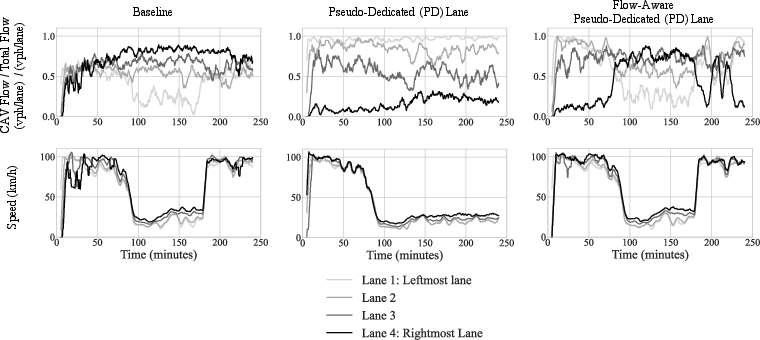
Figure 7: Ratio of CAV flow to total flow (Freeway network in Fig. 5).
Figure 8 further illustrates successful lane changes and increased platoon lengths without associated discharge flow reduction.
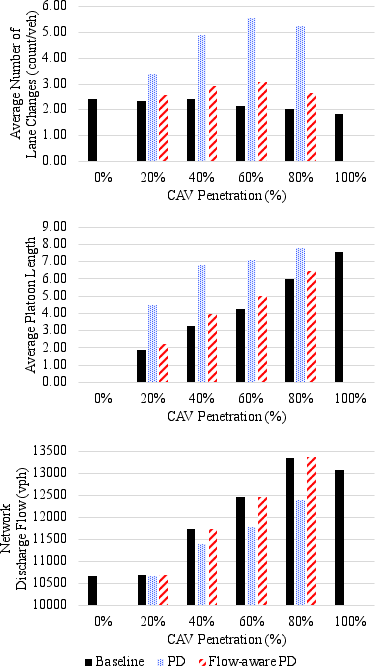
Figure 8: Increase of lane changes and platoon lengths without flow disruption under Flow-Aware Platoon Organization.
Conclusion
This research underscores the intricate dynamics of platoon organization in mixed traffic systems involving CAVs and non-CAVs. While naive platoon organization might undermine traffic flow through excessive lane changing, a Flow-Aware strategy can broker a balance, optimizing platoon formations under conducive traffic conditions. Future work is necessitated in refining lane-change models to accommodate automation and enhance the precision of flow-aware adaptation. Considerations of energy efficiency alongside traffic capacity will be crucial as the deployment of CAVs progresses.