- The paper presents a novel Model Predictive Control approach that integrates static and dynamic collision avoidance within a unified optimization framework.
- It employs a relaxed barrier function, dynamic ESDF, and moving cylinder model with a Kalman filter to streamline real-time obstacle detection and prediction.
- Experimental evaluations on the ANYmal robot demonstrate minimal computational overhead and robust performance in real-world cluttered environments.
Collision-Free MPC for Legged Robots in Static and Dynamic Scenes
Introduction
The paper "Collision-Free MPC for Legged Robots in Static and Dynamic Scenes" (2103.13987) discusses an innovative Model Predictive Control (MPC) strategy aimed at enabling legged robots to navigate seamlessly in environments populated with static and dynamic obstacles. The proposed approach integrates collision avoidance seamlessly into the dynamic motion planning of robots, allowing for efficient navigation and response to environmental changes.
Methodology
The authors introduce a holistic MPC approach that encapsulates both static and dynamic collision avoidance within a single optimization framework. The technique involves the inclusion of a relaxed barrier function within the MPC's cost function, streamlining obstacle avoidance without increasing computational complexity significantly.
Collision Avoidance Framework
The cornerstone of this approach is the dynamic generation of an Euclidean Signed Distance Field (ESDF) for static collision checks and a moving cylinder model for dynamic obstacles. An ESDF provides robust noise reduction by averaging distance measurements, while the moving cylinder model facilitates the prediction of dynamic obstacles' paths using a Kalman filter, improving the robot's anticipatory responses to potential collisions.
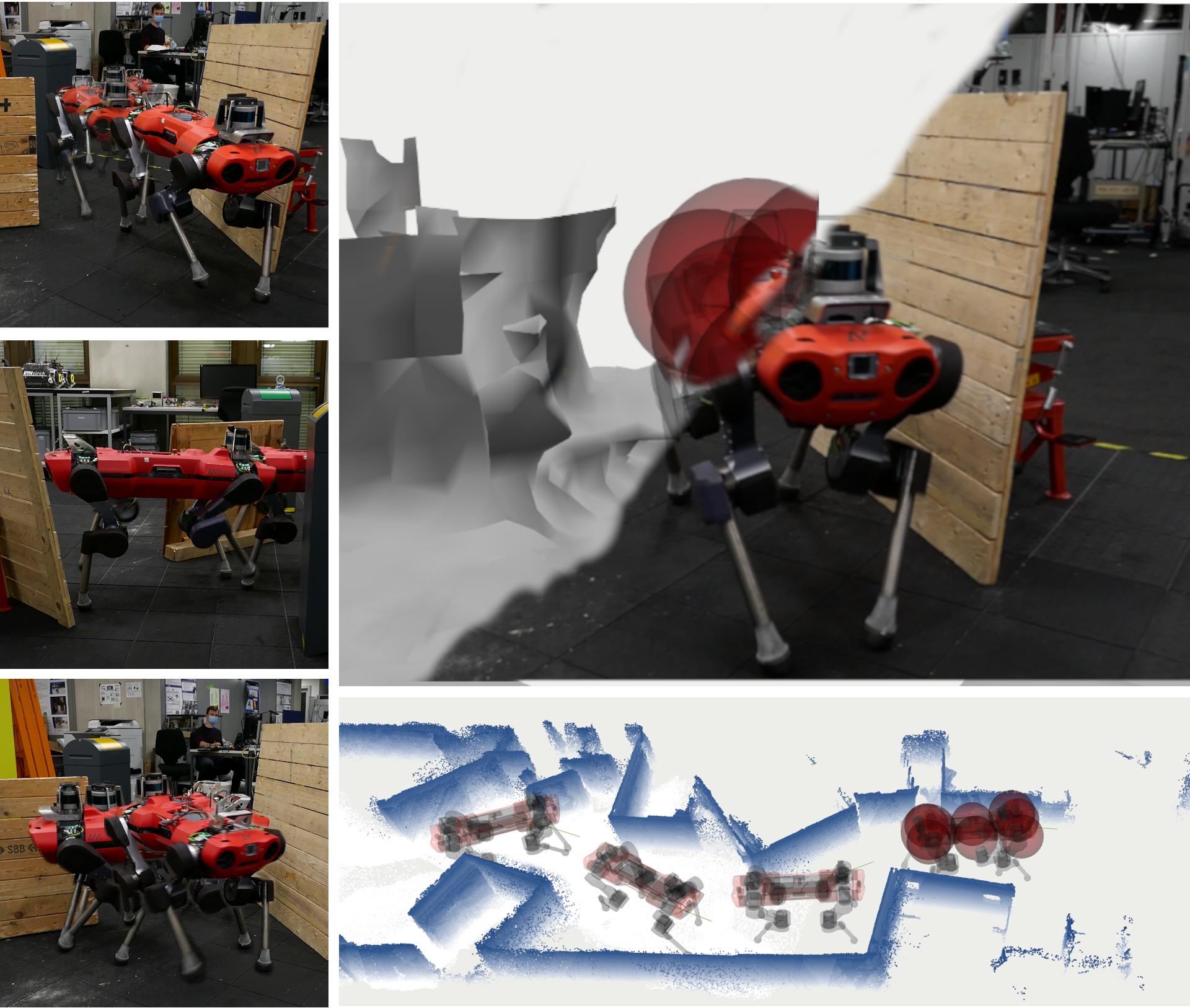
Figure 1: Our quadrupedal robot, ANYmal, navigating collision-free through narrow passages using an SDF for environment interactions.
System Integration
Two map servers asynchronously update the environment representation, integrating static and dynamic data for comprehensive collision detection (Figure 2). The current obstacle configurations are cached within the MPC system, ensuring real-time responsiveness.

Figure 2: Asynchronous environment integration updating static and dynamic surroundings for real-time optimization.
Implementation Details
The architecture employs a Sequential Linear Quadratic (SLQ) control strategy, leveraging the Differential Dynamic Programming (DDP) to accommodate dynamic infeasibility and kinematic constraints. By unifying these elements, the approach realizes whole-body motion planning that capitalizes on the robot's full dynamic and kinematic range.
Sphere Decomposition
A sphere decomposition method simplifies collision detection by reducing the robot's complex structure into manageable collision bodies. These bodies interact with environment representations to determine potential collision points, employing a squared-hinge penalty function to signal impending collisions (Figure 3).
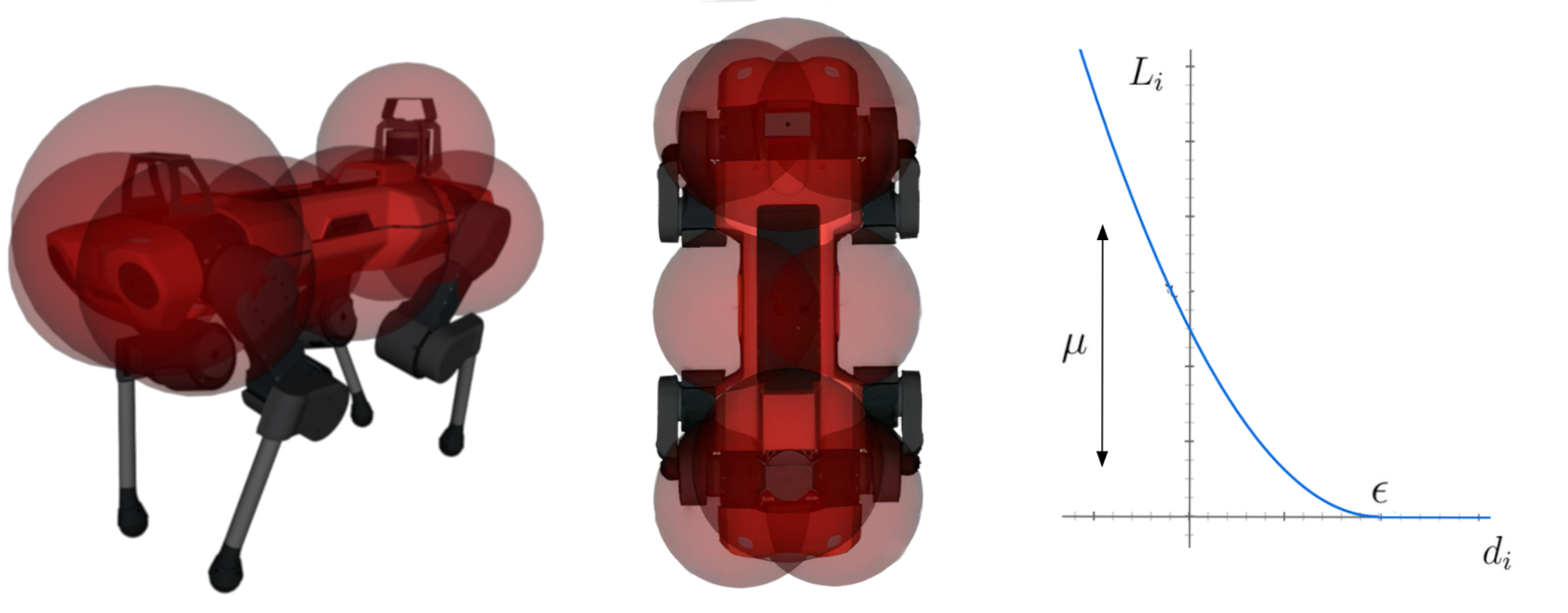
Figure 3: Sphere decomposition of the robot and a squared-hinge penalty function to manage collision avoidance.
Experimental Evaluation
Real-World Testing
Experiments demonstrated the efficacy of the MPC framework in various scenarios, including ducking under obstacles and evading fast-moving agents. These behaviors were autonomously discovered by the robot without heuristics, underscoring the comprehensive nature of the optimization (Figure 4 and Figure 5).
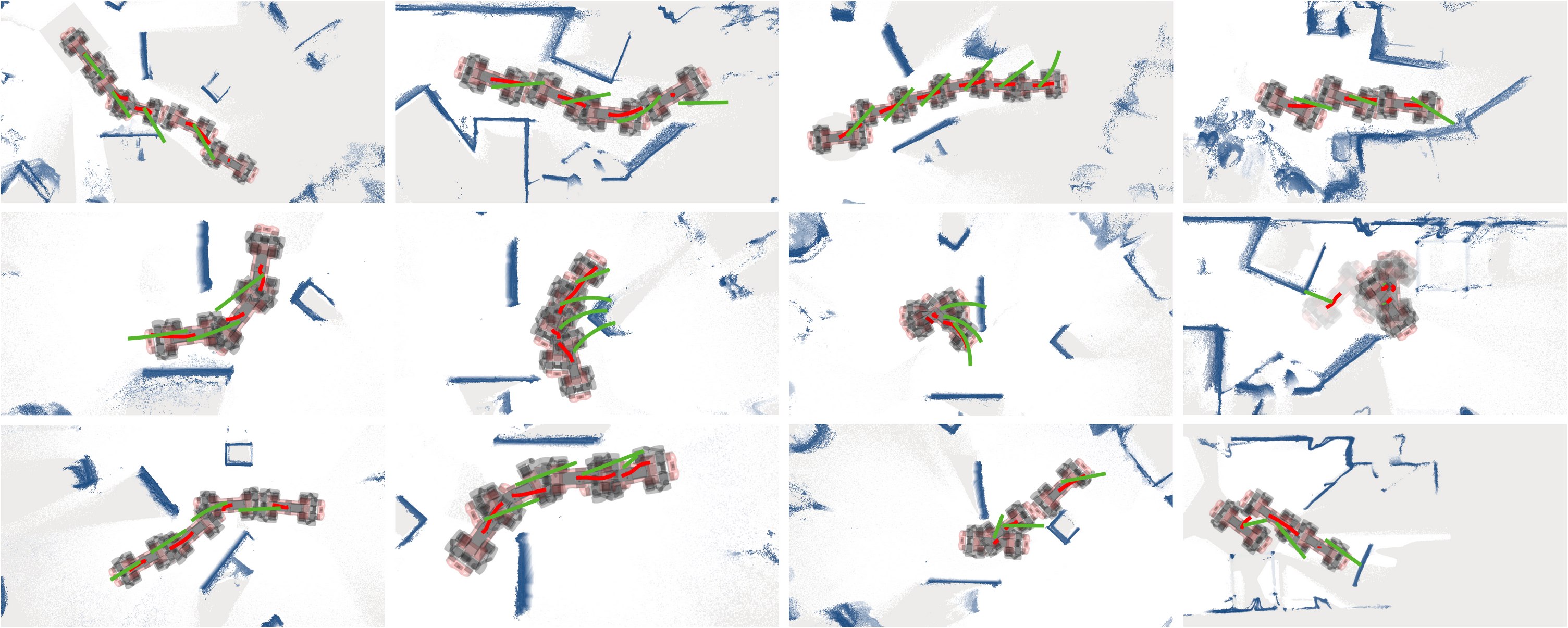
Figure 4: Collection of different emerging behaviors during real-world experiments showcasing trajectory adjustments.
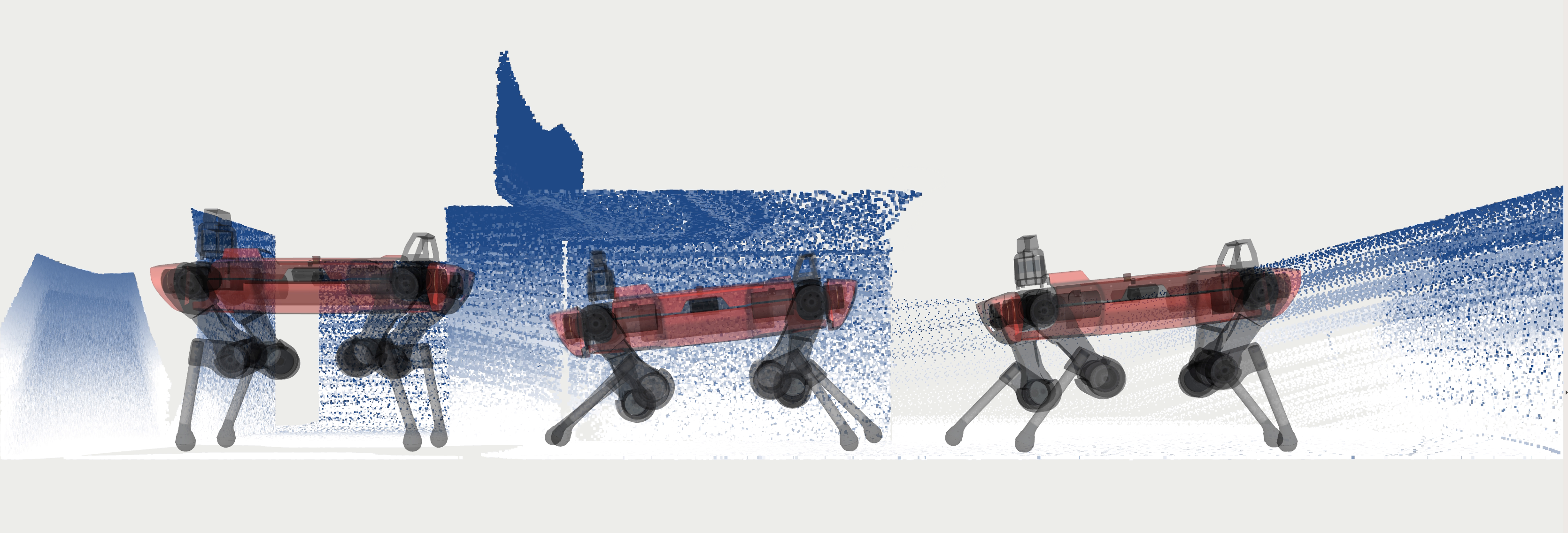
Figure 5: ANYmal ducking under an overhanging obstacle autonomously during forward motion.
Computational Overhead
Despite the enhanced capabilities, the real-time implementation incurs minimal computational overhead, increasing processing time by only 6% compared to blind MPC systems (Figure 6).
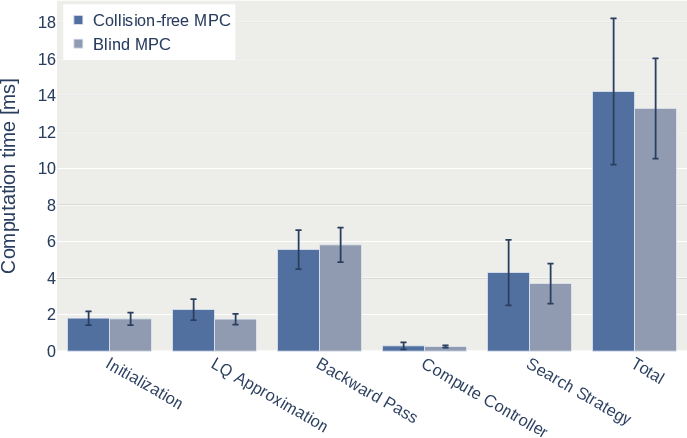
Figure 6: Computational comparison showing marginal overhead introduced by collision-free strategies.
Discussion and Future Work
The proposed MPC framework enhances legged robot responsiveness and safety by effectively integrating collision avoidance into dynamic motion planning. Future work aims to extend these capabilities to encompass complex terrain navigation through swing foot trajectory planning.
Conclusion
This research advances legged robotics by introducing a refined MPC approach that seamlessly incorporates collision avoidance. Demonstrated on the quadrupedal robot ANYmal, it achieves significant improvements in navigating cluttered and dynamic environments, paving the path for sophisticated legged robot applications.