- The paper’s main contribution is an energy-based deep structured model that jointly integrates prediction and planning for self-driving vehicles.
- A probabilistic framework assigns joint energy costs to discrete actor trajectories, enabling reactive planning by considering inter-actor dynamics.
- Experimental results in CARLA and Simba simulations show improved maneuver success and time efficiency compared to non-reactive baselines.
Deep Structured Reactive Planning
This essay provides an expert-level analysis of the paper "Deep Structured Reactive Planning" (2101.06832), highlighting its novel methodologies, key results, and implications in the field of autonomous vehicle planning. The research proposes a deep structured model that jointly addresses prediction and planning in self-driving vehicles, fundamentally transforming how autonomous systems handle dynamic environments.
The paper introduces a sophisticated energy-based deep structured model that simultaneously addresses the prediction and planning challenges faced by self-driving vehicles (SDVs). Unlike traditional autonomy stacks that separate perception, prediction, and planning modules, this model integrates these processes to allow reactive planning. The central innovation lies in its ability to predict actor behavior conditioned on potential ego-agent trajectories, a capability absent in non-reactive systems.
The model is formulated as follows: the future trajectories of all actors, including the SDV, are represented as discrete random variables. A probabilistic framework assigns joint energy costs to these trajectories, which induce a probability distribution over possible future scenarios. The structured model encompasses actor-specific energies, reflecting individual trajectory costs, and interaction energies, capturing inter-actor dynamics.
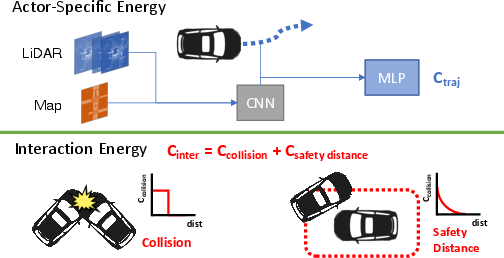
Figure 1: Overview of the actor-specific and interaction energy terms in our joint structured model.
The reactive planning objective optimizes the SDV's trajectory by evaluating the expectation of joint energies over possible future actor configurations conditioned on current SDV plans. This objective ensures the ego-agent makes decisions that account for the reactions of other traffic participants, leading to more efficient navigation.
Experimental Evaluation and Results
The model's efficacy is validated through comprehensive simulations conducted in two distinct environments: the CARLA simulator and an in-house simulator named Simba. These simulations are designed to replicate complex, high-interaction driving scenarios, such as lane merges in dense traffic. The results, as presented in the paper, demonstrate superior performance of the reactive model compared to non-reactive baselines. Notably, the model achieves higher success rates in completing maneuvers and reduced time-to-completion without increasing collision rates.

Figure 2: Comparison of a non-reactive planner vs. a reactive one in a lane merge scenario. Potential ego future trajectories are in gray.
Furthermore, the model's predictive accuracy is comparable to, or exceeds, state-of-the-art methods for actor trajectory forecasting. The integration of prediction and planning within a unified framework allows for more precise trajectory optimization and enhanced safety margins in dynamic environments.
Implications and Future Directions
The research presents significant implications for both theoretical and practical applications in autonomous vehicle technology. The structured model seamlessly integrates planning and prediction, addressing one of the primary limitations in existing autonomous systems. By modeling the interactive effects of an ego-agent's actions, the model advocates for a shift towards more reactive, context-aware planning paradigms in real-world deployments.
The paper also opens avenues for future exploration. The integration of additional contextual information, such as pedestrian behaviors and dynamic environmental conditions, may further enhance the robustness of the planning objective. Moreover, extending the framework to accommodate continuous action spaces could improve granularity and decision-making precision in complex scenarios.
Conclusion
The proposed deep structured reactive planning framework represents a novel contribution to the domain of autonomous vehicle navigation. By addressing the intertwined nature of planning and prediction, the research sets a foundation for more advanced, interactive autonomous systems capable of safely and efficiently navigating complex traffic environments. As the field progresses, the principles outlined in this paper will undoubtedly influence future research directions and applications in autonomous technology.

