- The paper develops a linearized dynamic model for a '1+n' mixed platoon, demonstrating stable and controllable dynamics irrespective of platoon size.
- It introduces an optimal control framework with terminal velocity optimization to enhance traffic throughput and lower fuel consumption.
- Simulation results using SUMO validate the approach, showing significant reductions in travel time delays compared to traditional methods.
Summary of "Mixed platoon control of automated and human-driven vehicles at a signalized intersection: dynamical analysis and optimal control" (2010.16105)
The paper presents a comprehensive examination of the control and optimization of mixed traffic scenarios involving Connected and Automated Vehicles (CAVs) and Human-Driven Vehicles (HDVs) at signalized intersections. Urban intersections often serve as critical nodes in traffic networks and directly influence traffic congestion and flow efficiency. Recognizing the future landscape where CAVs will coexist with HDVs, this study addresses the gap in research regarding mixed platoon dynamics and optimal control at signalized intersections.
Mixed Platoon Concept and Dynamics
The study introduces the concept of a "1+n" mixed platoon, which consists of one leading CAV followed by n HDVs. This formation is particularly relevant for scenarios where CAV Market Penetration Rate (MPR) is still emerging, hence the presence of HDVs is significant. The authors develop a linearized model of the mixed platoon's dynamics and demonstrate through rigorous theoretical analysis the stability and controllability of the platoon. These properties are shown to be independent of the platoon's size, n. The controllability allows the CAV to effectively influence the behavior of following HDVs without direct interference with their inherent driving patterns.
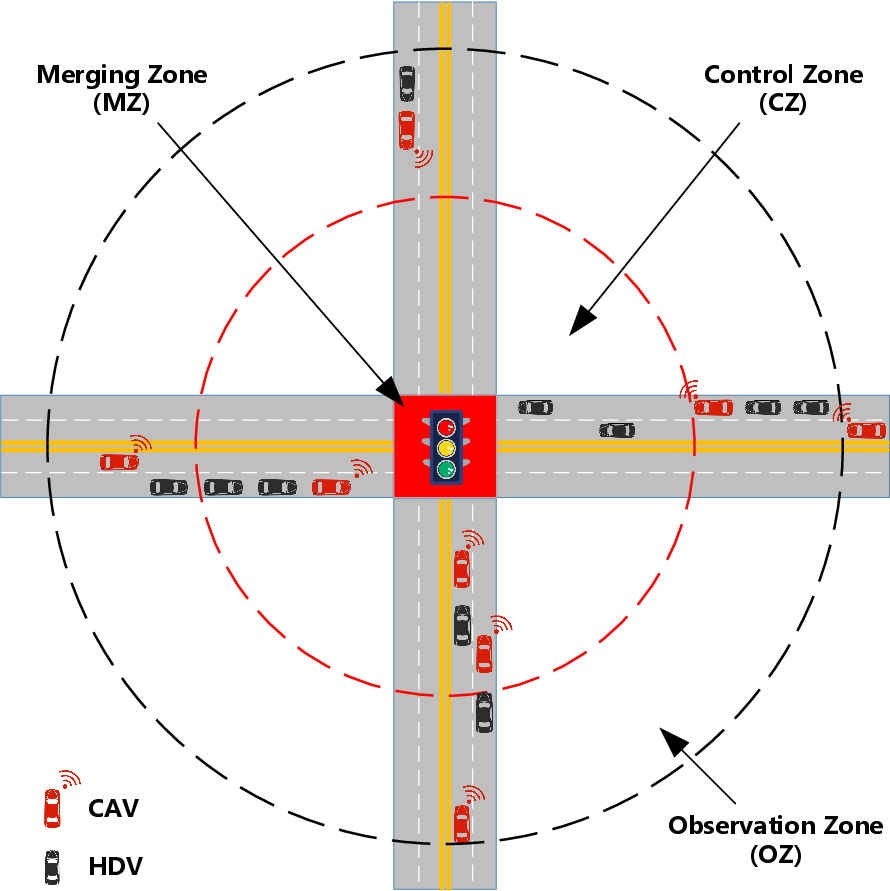
Figure 1: Illustration for the mixed traffic intersection. Red vehicles represent CAVs, which can transmit and receive vehicle information and the vehicle is fully autonomous driving. Black vehicles represent HDVs, which can only transmit ego vehicle information to other vehicles and are controlled by car following model.
Optimal Control Framework
The paper details an optimal control framework designed to enhance traffic efficiency and minimize fuel consumption in mixed platoons at intersections. The framework involves the optimization of velocity trajectories for CAVs, considering the behavior and dynamics of the following HDVs. An innovative aspect of the control strategy is the terminal velocity optimization, significantly differing from traditional methods that only enhance CAV performance. The equilibrium state dynamics are derived using linearized car-following models, like the Optimal Velocity Model and Intelligent Driver Model, allowing the formulation of a robust control strategy that optimizes overall traffic throughput.
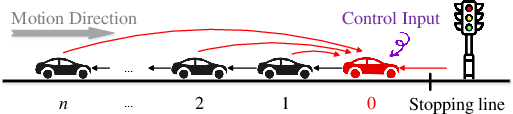
Figure 2: Schematic for the ``1+n'' mixed platoon. Red arrows denote the information flow of the leading CAV (colored in red), which collects information from the following HDVs as well as the traffic light and has an external control input. Black arrows represent the information flow of the HDVs (colored in black), which are under control by human drivers and only acquire information from the preceding vehicle.
Hierarchical Algorithm and Simulation
A hierarchical event-triggered algorithm is proposed for practical implementation. It addresses the potential collision between adjacent mixed platoons, enabling real-time applicability of the optimal control framework across varied MPRs and traffic densities.
The simulation results, conducted using the SUMO traffic simulation environment, validate the control framework's effectiveness in reducing Average Travel Time Delays (ATTD) and fuel consumption. The study reveals that mixed platoon-based control surpasses traditional single CAV trajectory optimization methods, especially in high-density traffic scenarios. It highlights the advantage of utilizing CAVs as mobile actuators to benefit the broader traffic ecosystem rather than focusing solely on individual vehicle performance.
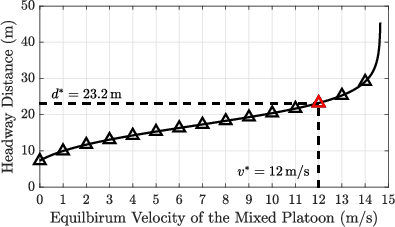
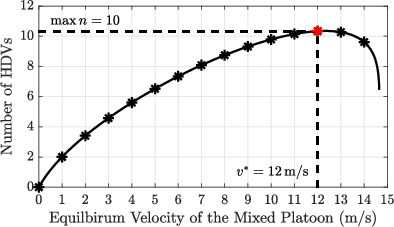
Figure 3: Relationship between equilibrium velocity of the mixed platoon (i, terminal platoon velocity) and passing number n of HDVs. OVM is taken as the car-following model, whose parameters are shown in Table provided.
Implications and Future Directions
The findings provide valuable insights into designing and deploying control policies for intersections in mixed traffic environments. The framework's global approach, emphasizing the platoon rather than individual CAVs, aligns with broader traffic flow optimization strategies. Future research could explore cooperative control among multiple CAVs in a platoon to further improve performance at intersections.
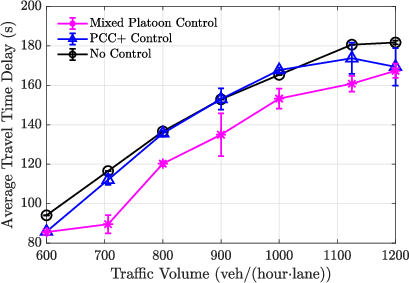
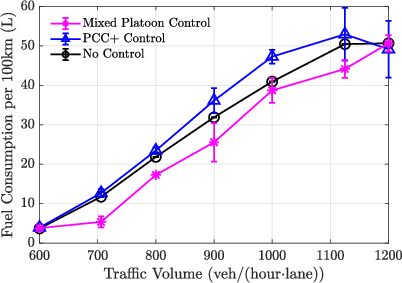
Figure 4: Performance comparison between the three algorithms in different traffic volumes (MPR = 50\%). Standard deviations of the data are also provided as error bars.
Conclusion
This paper represents a significant contribution to the control of mixed traffic systems, showcasing the potential improvements in traffic efficiency and sustainability achievable through advanced CAV technologies. The research provides a scalable method that could accelerate the integration of CAVs into existing traffic infrastructures, fostering safer and more efficient urban mobility. Further investigation into heterogeneous dynamics and field validation through real-world traffic experiments will be crucial for the continued advancement and practical deployment of these strategies.

