- The paper presents a decentralized bi-level control framework that optimizes both fuel consumption and travel times for connected and automated vehicles.
- The upper-level planning schedules optimal arrival times and lane-changing maneuvers, while the low-level control computes acceleration and deceleration inputs.
- Simulation results demonstrate significant improvements, achieving up to 55% fuel reduction and 24% travel time reduction with millisecond-level computation efficiency.
Optimal Control of Connected and Automated Vehicles at Multiple Adjacent Intersections
Introduction
The paper "Optimal Control of Connected and Automated Vehicles at Multiple Adjacent Intersections" (2008.02379) presents a decentralized control framework for the coordination of connected and automated vehicles (CAVs) across multiple adjacent intersections. As urban populations continue to rise without a concomitant increase in roadway capacity, traffic congestion becomes a pressing issue. The integration of CAVs offers one promising solution to mitigate congestion and enhance safety. Leveraging a decentralized approach, the authors propose a novel bi-level framework that optimizes both fuel consumption and traffic throughput.
Framework Design
Upper-level Planning
The upper-level planning computes optimal arrival times for CAVs at each intersection to minimize fuel consumption and reduce stop-and-go driving patterns. This layer includes recursive calculations to schedule arrivals, while optimizing lane selection to improve overall traffic throughput. The use of lane-changing maneuvers within a designated 'lane-changing zone' enhances traffic flow by allowing CAVs to dynamically select lanes, subject to feasibility constraints.
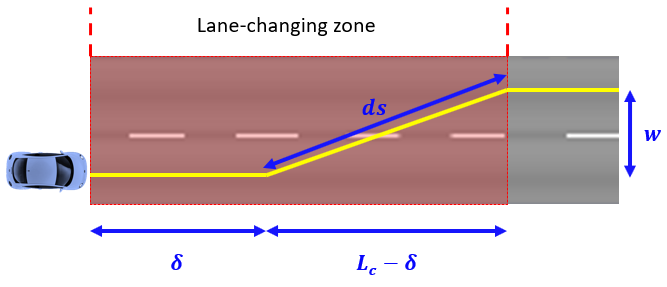
Figure 1: Lane-changing maneuver.
Low-level Planning
Subsequent to the upper-level scheduling, the low-level planning formulates an optimal control problem. This layer determines the control inputs—specifically acceleration and deceleration—necessary for CAVs to cross intersections efficiently. By solving this optimal control problem with interior-point constraints, the framework ensures a smooth transition through intersection zones without compromising energy efficiency. The authors present a comprehensive analysis of these constraints and offer a closed-form solution.
Simulation and Results
Scenario Analysis
The authors conducted simulations in two scenarios: symmetric and asymmetric intersection setups. In the symmetric setup, multiple simulations demonstrated that the decentralized framework significantly reduced average travel times and cumulative fuel consumption compared to traditional traffic signal systems. The framework achieved a fuel consumption reduction of 32-55% and travel time reduction of 11-24% across varying traffic volumes as illustrated in Figure 2.
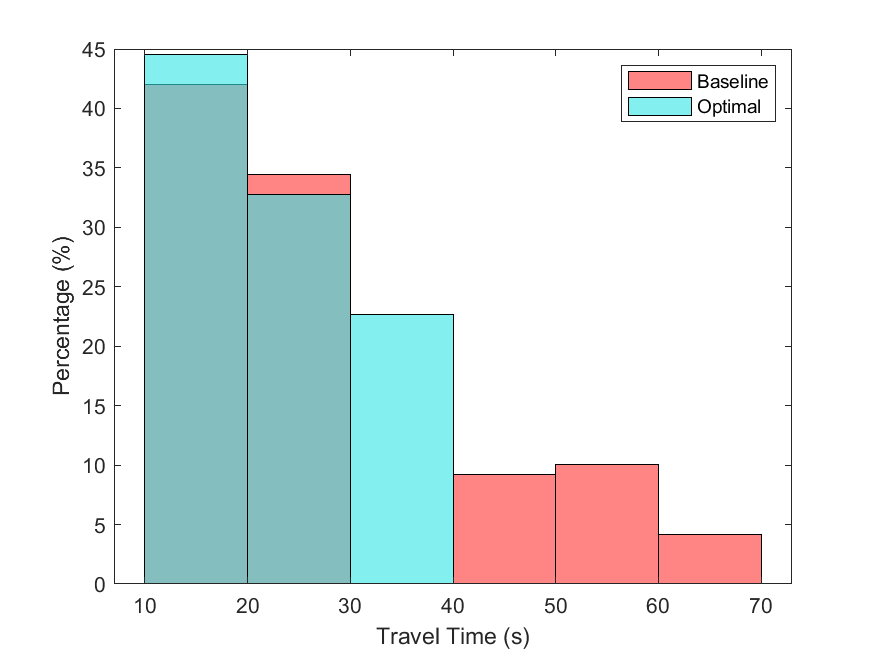
Figure 2: A relative frequency histogram for travel time of each vehicle for the first scenario in the baseline and optimal cases under traffic volume $\num{1400$.
In the asymmetric corridor setup, similar improvements were observed, with reductions in travel time and fuel consumption by 21-35% and 54-62% respectively.
Computational Efficiency
An analysis of computational complexity revealed that the proposed solution is efficient, with CAVs' trajectory computation averaging mere milliseconds. This confirms the framework's applicability for real-time implementation in dynamic urban environments.
Implications and Future Research
The proposed decentralized framework could fundamentally shift how urban traffic systems integrate CAVs by prioritizing fuel efficiency alongside throughput maximization. The analytical solutions and efficient computation suggest significant potential for scalability in denser traffic networks. Future research may extend to mixed-traffic scenarios with manual vehicles or explore robustness under varying communication reliability.
Conclusion
The paper's findings indicate strong potential for the proposed bi-level decentralized framework to transform urban intersection management. By optimizing control inputs for CAVs, this approach could significantly mitigate traffic congestion and enhance environmental sustainability. Such optimization frameworks are critical as urban environments evolve towards smarter city infrastructures integrated with autonomous and communicative transport systems.

