- The paper introduces the LCC framework that enables CAVs to act as both follower and leader, enhancing string stability in mixed traffic.
- It employs a comprehensive model combining HDV and CAV dynamics with controllability analysis to inform controller design.
- Simulations reveal that monitoring vehicles behind the CAV significantly broadens the head-to-tail string stability region and mitigates perturbations.
Leading Cruise Control in Mixed Traffic Flow
Introduction
The paper "Leading Cruise Control in Mixed Traffic Flow" (2007.11753) addresses a novel approach in enhancing traffic system performance by utilizing vehicle-to-vehicle (V2V) communications through a strategy termed Leading Cruise Control (LCC). In contrast to the existing frameworks which mainly focus on adapting to downstream traffic conditions, the proposed LCC framework considers the influence of connected and autonomous vehicles' (CAVs) actions on the upstream flow. This introduces a dual role for the CAV as both a follower and a leader in traffic dynamics. The paper investigates the modeling, controllability, and string stability aspects of LCC, aiming at smoothing traffic flow and mitigating instabilities.
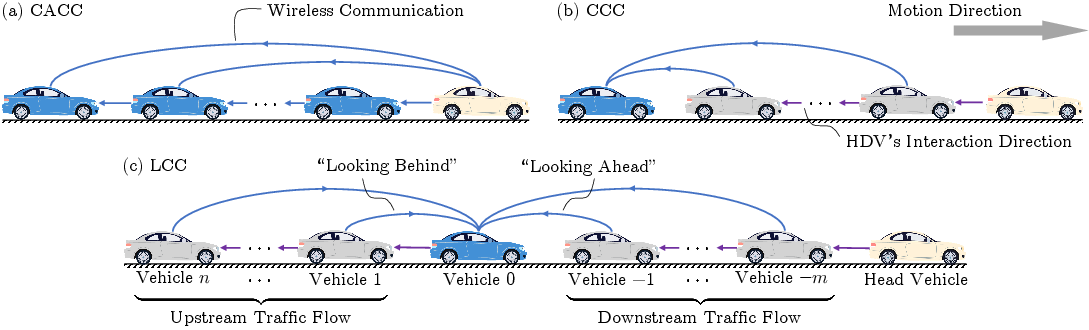
Figure 1: Various control frameworks for CAVs, illustrating CACC, CCC, and the proposed LCC.
Modeling Framework for LCC
The paper presents a comprehensive modeling framework for LCC by introducing the longitudinal dynamics of human-driven vehicles (HDVs) and integrating the dynamics of CAVs (2007.11753). HDV behavior is captured using continuous-time car-following models like the Optimal Velocity Model (OVM). The equilibrium state representation and linearization yield a second-order model that reflects real driving behavior.
In LCC, the CAV dynamically adjusts its behavior based on both the preceding and following vehicles. This concept extends previous methodologies by incorporating upstream dynamics, allowing the CAV to influence vehicles behind it - an approach distinct from traditional car-following strategies.
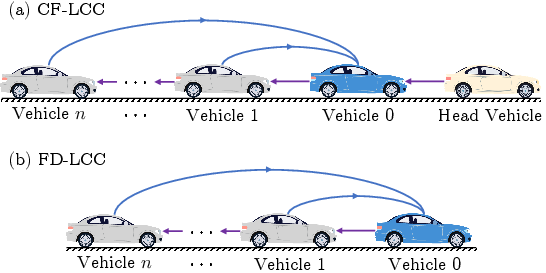
Figure 2: Two special cases of LCC focusing on individual driving behaviors: Car-Following LCC and Free-Driving LCC.
Controllability Analysis
A pivotal aspect of the LCC framework is its controllability. The paper demonstrates that under mild conditions, the subsystem involving the CAV and trailing HDVs is controllable, whereas the upstream HDV dynamics remain unaffected. This result highlights the role of CAVs as sophisticated traffic leaders, capable of modulating upstream traffic flow effectively.
The controllability proof generalizes previous stabilizability findings from closed ring-road configurations, illustrating the potential of CAV-induced traffic stabilization on open road scenarios (2007.11753).
Head-to-Tail String Stability
String stability is crucial for understanding a vehicle's ability to attenuate velocity fluctuations propagating through a traffic flow. The paper derives the head-to-tail transfer function for LCC, which reveals significant distinctions between monitoring preceding and following vehicles.
Simulations compare different feedback policies, showing that incorporating vehicle states from behind enhances the options for achieving string stability. This approach leverages V2V communications to broaden the capability of CAVs in suppressing traffic instabilities, beyond the "looking ahead" tactic prevalent in CCC-type frameworks.
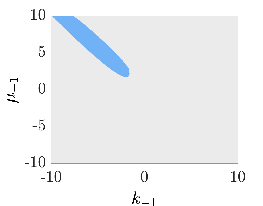
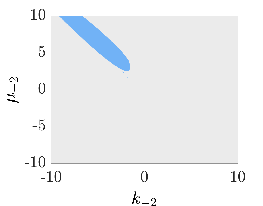
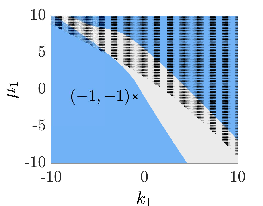
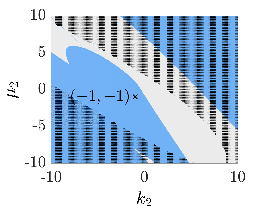
Figure 3: Head-to-tail string stability charts demonstrating feedback influences when monitoring individual vehicles.
Empirical Results and Discussion
Numerical studies detail string stable regions and perturbation mitigation capabilities of LCC, emphasizing its effectiveness compared to conventional methods. Figures illustrate how monitoring vehicles behind the CAV, as well as those ahead, facilitates broader and more effective string stabilization.
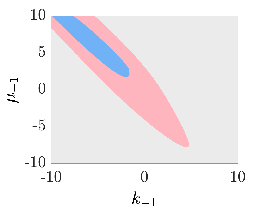
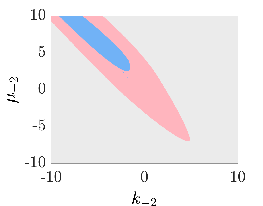
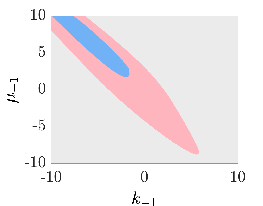
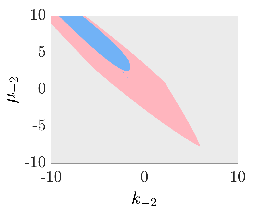
Figure 4: Expanded head-to-tail string stability regions when considering vehicles behind, highlighting the advantages of the LCC framework.
Conclusion
This paper contributes to the domain of intelligent transportation systems by proposing the LCC framework, demonstrating its advantages in handling mixed traffic scenarios. By proving controllability and enhancing string stability through novel vehicle-monitoring strategies, LCC stands out as a promising approach for future CAV deployment.
Potential future work could explore more sophisticated controller designs and assess how human driver uncertainties and reaction times may impact LCC performance. The integration of V2V and vehicular automation positions LCC as a significant step towards optimized traffic management in increasingly autonomous vehicle environments.

