- The paper introduces a tree search method using MCTS combined with heuristics to compute near-optimal vehicle passing orders at unsignalized intersections.
- Simulations demonstrate significant delay reductions and improved traffic throughput compared to traditional FIFO strategies.
- The study shows that integrating heuristic rules effectively narrows the decision space, which supports practical applications in connected automated vehicle systems.
Cooperative Driving at Unsignalized Intersections Using Tree Search
Introduction
The paper "Cooperative Driving at Unsignalized Intersections Using Tree Search" (1902.01024) introduces a novel strategy for optimizing traffic flow at unsignalized intersections using connected and automated vehicles (CAVs). The authors propose a tree-based approach combined with Monte Carlo Tree Search (MCTS) and heuristic rules to determine the optimal sequence for vehicles to pass through intersections. This strategy aims to find near-global-optimal passing orders within a short planning time, balancing computational efficiency and traffic performance.
Unsignalized intersections present a significant challenge for traffic optimization due to the absence of traffic signals to regulate vehicle flow. The core problem is identifying the optimal sequence for vehicle passage, which can minimize total delay. The strategy utilizes a tree-based representation of possible passing orders, with leaf nodes representing complete sequences. The root node starts with an empty passing order, and each successive layer represents partial orders, eventually mapping to full passing sequences.
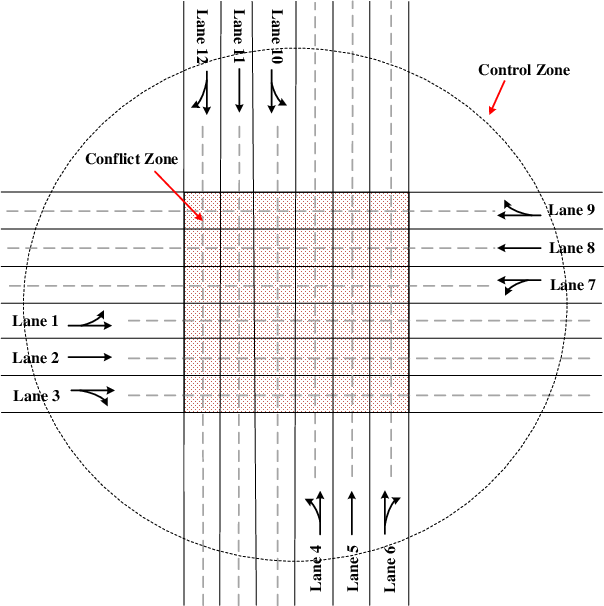
Figure 1: A typical intersection scenario.
MCTS Based Cooperative Driving Strategies
The proposed strategy employs MCTS, which is effective in large solution spaces with complex dynamics like those presented in Go. MCTS iteratively builds a search tree and evaluates nodes using scores based on potential vehicle delay minimization. This method includes selection, expansion, simulation, and backpropagation processes. Simulations explore possible sequences, and scores guide which nodes to prioritize during search.
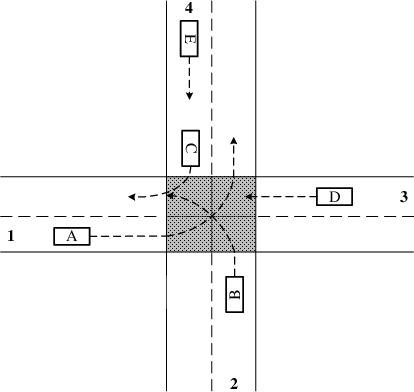
Figure 2: An intersection scenario with 5 vehicles.
Adding heuristic rules enhances the simulation phase, reducing reliance on random sampling. The two main rules prioritize vehicles based on proximity to the conflict zone and desired arrival times, respectively. This approach improves search efficiency by focusing on promising branches in the decision tree.
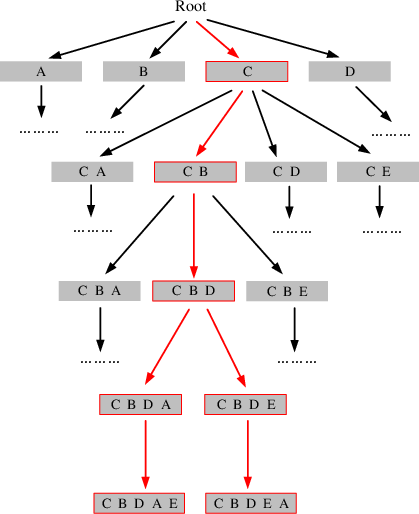
Figure 3: The solution tree stemmed from the intersection scenario shown in Fig. 2. The leaf nodes in the bottom layer represent the complete passing orders for all vehicles.
Simulation and Results
The study conducts various simulations to validate the strategy under different traffic scenarios. Parameters such as the weighting factors and computation time budget are optimized through extensive testing. Specifically, the study highlights that the strategy achieves significant improvements even with varied parameter settings.
Among the scenarios tested, substantial reductions in delay and improvements in traffic throughput are observed when compared to the baseline FIFO strategy. The findings underscore the capacity of the MCTS-based approach to scale efficiently with intersection complexity and vehicular count.
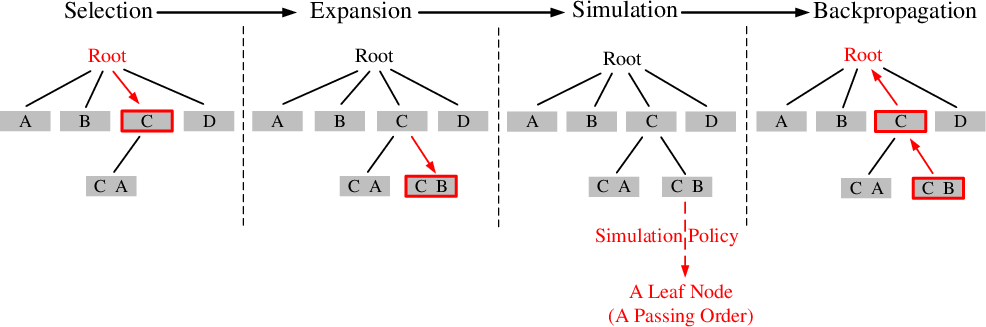
Figure 4: One iteration of the MCTS based cooperative driving strategy.
A Further Look
The research demonstrates the strategy's capability to intelligently navigate the complex structure of possible vehicle passing sequences. By employing heuristic rules, the system effectively narrows down the potential solutions, focusing computational resources on high-probability sequences rather than exhaustive enumeration.
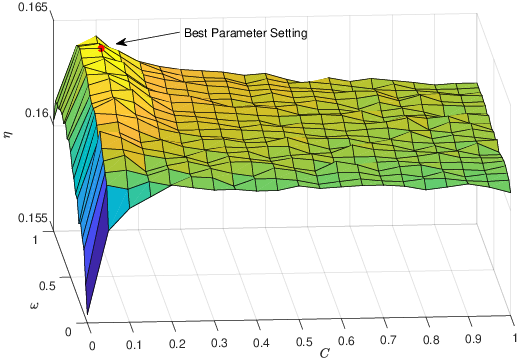
Figure 5: The improvement rate of the MCTS based strategy with different parameter settings for the intersection shown in Fig.1.
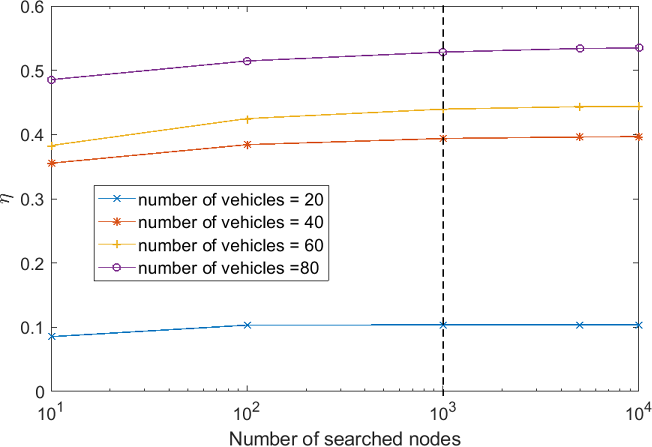
Figure 6: The results of the improvement rates with respect to the number of searched nodes for the intersection shown in Fig.1.
Conclusion
The study introduces a robust method for addressing unsignalized intersection challenges, combining MCTS with heuristic simulation to optimize vehicle passage sequence efficiently. Future research could explore the application of this strategy to other complex traffic scenarios, such as highway merging or ramp areas. The promising results pave the way for further integration into real-world traffic management systems, potentially utilizing automated vehicle platforms for empirical testing and refinement.
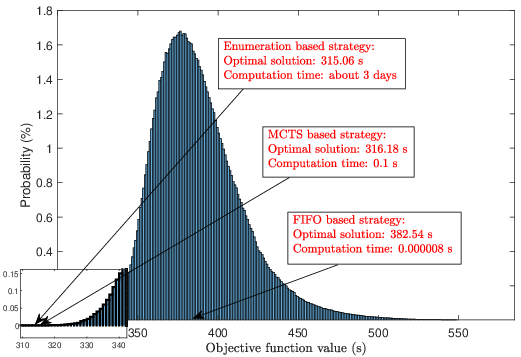
Figure 7: The histogram of all solution values for a single lane intersection scenario with 20 vehicles.
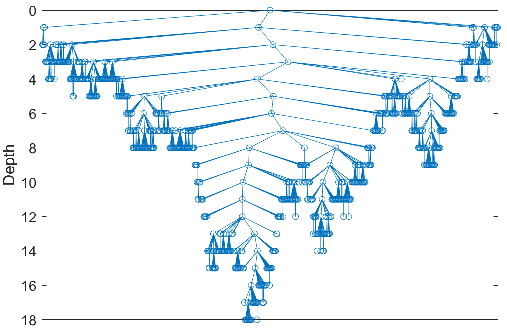
Figure 8: The structure of a search tree for an intersection scenario with 50 vehicles.