- The paper presents a dynamic Bayesian trust model integrated into symbolic motion planning to enhance decision-making and safety in multi-robot systems.
- It introduces trust-based specification decomposition, allowing individual robots to share tasks efficiently based on real-time trust assessments.
- Simulation results confirm that real-time switching between manual and autonomous modes boosts task efficiency while maintaining collision-free operation.
Trust-based Multi-Robot Symbolic Motion Planning with a Human-in-the-Loop
The paper "Trust-based Multi-Robot Symbolic Motion Planning with a Human-in-the-Loop" presents an approach to leverage human-robot interaction in symbolic motion planning for multi-robot systems. This research focuses on distributed symbolic motion planning, addressing scalability, safety, performance, and adaptability challenges by integrating human trust models and real-time human intervention.
Symbolic Motion Planning in Human-Robot Interaction
The paper introduces a symbolic motion planner that operates at both discrete and continuous levels. This involves decomposing the workspace into discrete cells labeled with symbolic information and synthesizing motion paths that satisfy temporal logic specifications. The planner guarantees collision-free paths by avoiding cells labeled as obstacles.
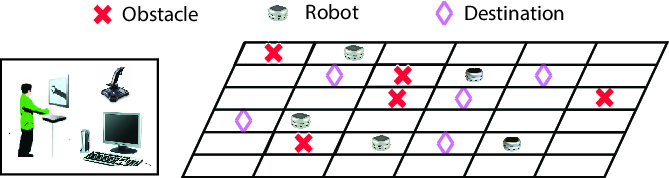
Figure 1: Multiple robots must reach a set of destinations while avoiding obstacles and collisions, with human oversight when trusted.
Dynamic Trust Model
A central contribution of this work is the development of a probabilistic trust model, which dynamically evaluates trust levels based on robot performance, human performance, and system faults. Trust is modeled as a dynamic Bayesian network, allowing for real-time updates and facilitating trust-based decision-making in multi-robot scenarios.
Trust-Based Specification Decomposition
The specification decomposition leverages compositional reasoning methods, allowing each robot to independently handle local tasks while sharing information with others. Trust evaluation informs task allocation, effectively balancing the workload across the system based on trust levels in individual robots. This decomposition ensures that tasks are distributed such that trusted robots are assigned more destinations.
Real-Time Switching Between Motion Planning Modes
The approach introduces a real-time trust-based switching mechanism between manual and autonomous modes of motion planning. This mechanism maximizes task efficiency while maintaining safety by switching modes based on quantified trust levels (Figure 2).
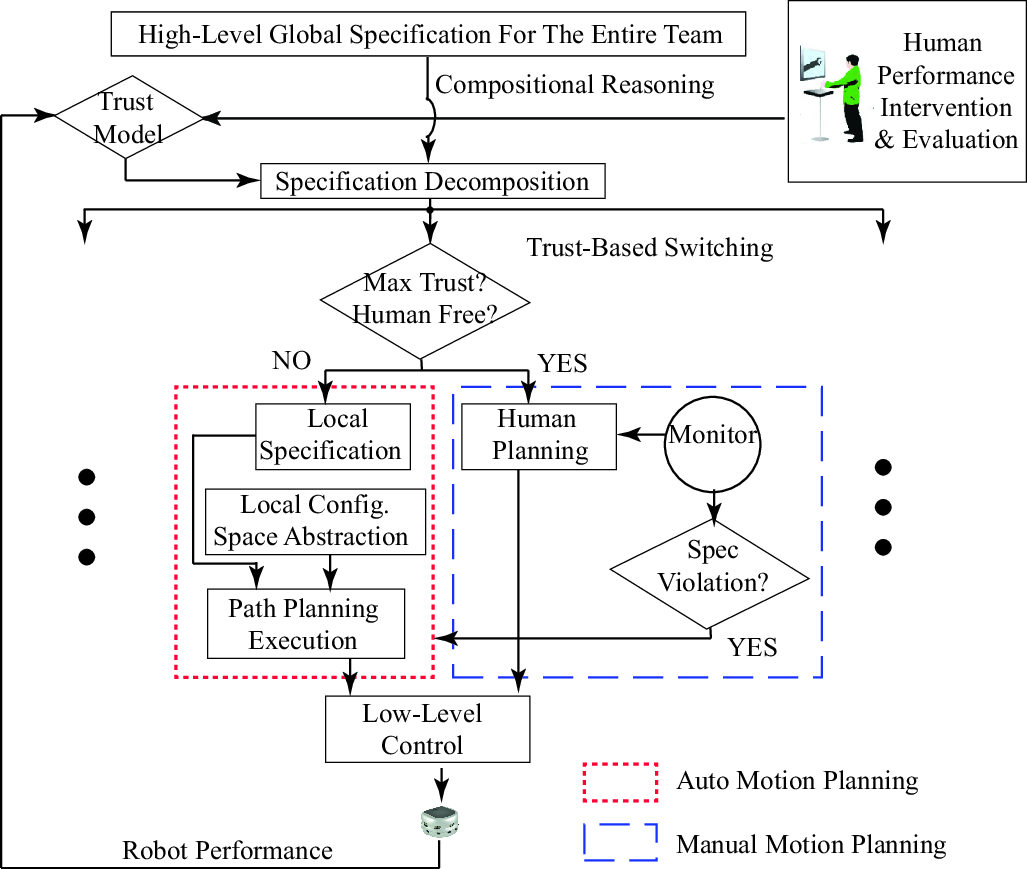
Figure 2: Schematic diagram of trust-based symbolic motion planning for human and multi-robot collaboration systems.
Deadlock and Livelock-Free Algorithms
Algorithms are proposed to handle potential deadlock and livelock scenarios, ensuring all defined goals are reached. The robot can adaptively reassign goals during replanning processes when collisions or obstacles are detected, guaranteeing task completion.
Simulation Results
Simulations in diverse scenarios, including intelligent surveillance and reconnaissance tasks, were conducted to verify the implementation. The results demonstrate the effective functioning of dynamic trust estimation, task allocation, and the trust-based switching framework. Robots with high trust levels achieved optimal task efficiency without compromising safety (Figure 3).
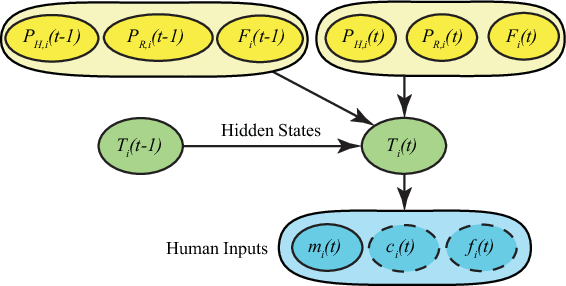
Figure 3: \small{A dynamic Bayesian network (DBN) based model for dynamic, quantitative, and probabilistic trust estimates.
Conclusion
This paper's contribution lies in effectively combining symbolic motion planning and dynamic trust models in real-time multi-robot scenarios. The integration of trust into motion planning shows potential for diverse applications, from surveillance to search and rescue operations. Future work might explore integrating more complex trust dynamics and extending the framework to handle broader classes of tasks.

