- The paper introduces an Intelligent Intersection Control System (IICS) to reduce travel times by 38-52% using adaptive signal control and AV trajectory optimization.
- The methodology employs real-time data and recursive models to harmonize AV trajectories with conventional vehicle flow in undersaturated conditions.
- Simulation results in 3000 varied scenarios validate the system's effectiveness in minimizing delays and preventing queue formation.
In the context of evolving transportation systems, the integration of Automated Vehicles (AVs) with existing infrastructure presents a complex challenge, particularly in signalized intersections where conventional and automated vehicles converge. This paper explores the development and simulation of an Intelligent Intersection Control System (IICS) designed to optimize both signal control and AV trajectories under undersaturated traffic conditions. The IICS utilizes real-time data to facilitate efficient intersection management, aiming to reduce average travel time by an impressive margin compared to conventional signal control methods.
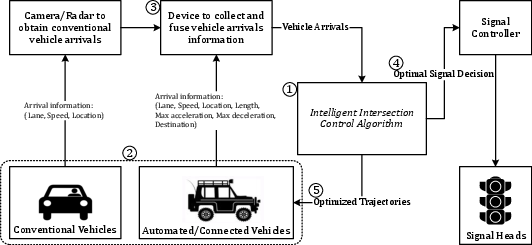
Figure 1: Intelligent Intersection Control System (IICS).
Introduction and Background
Autonomous and Automated Vehicles (AVs) offer significant enhancements over conventional vehicles by incorporating Vehicle-to-Infrastructure (V2I) communication capabilities, promising transformations in intersection management. The study shifts focus from basic autonomous navigation to optimizing these vehicles' movement in mixed-traffic scenarios, leveraging their communication abilities to manage intersection crossing sequences effectively. An emphasis is placed on the variation of vehicle functionalities from connected vehicles with human drivers to fully autonomous AVs, highlighting advancements in trajectory optimization intertwined with adaptive signal controls.
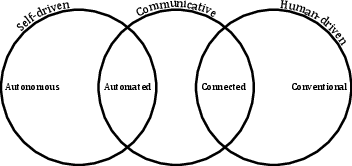
Figure 2: Vehicles’ classification based on their functionality.
Methodology
The core methodology involves deploying a trajectory-based optimization algorithm harmonized with an enhanced adaptive signal control system. Recognizing a non-saturated traffic condition, the IICS algorithm dynamically coordinates AV trajectories and signal timings at intersections by analyzing arrival data collected at range-specific detection points. The algorithm ensures optimal acceleration patterns for AVs while estimating conventional vehicles' movements to minimize travel delay.
Innovatively, the algorithm establishes recursive models identifying lead-follower dependencies among vehicles in each lane, optimizing for minimized overall time delay. This recursive optimization for AVs is formulated as a non-convex problem, administratively solved by considering trajectory relationships and vehicle attributes, ensuring feasible and efficient intersection traversal.
Numerical Results
Simulation experiments reveal a substantial reduction in travel time, averaging 38-52% improvements under operational conditions when contrasted with conventional methods using actuated control in VISSIM. The tests ran across 3000 scenarios varying detection ranges, AV ratios, and saturation headway, underscoring the system's capacity to adapt to diverse traffic compositions effectively. Results demonstrate the IICS's proficiency in preventing queue formations under undersaturated conditions—an essential milestone in intersection management.
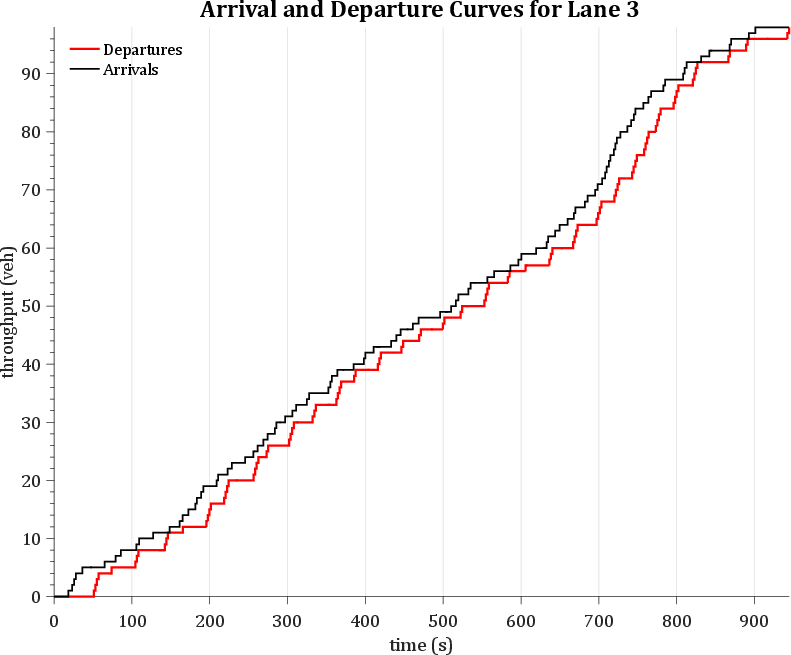
Figure 3: Cumulative arrival and departure curves after 15 minutes of simulation.
Comparative Analysis
To substantiate the prowess of the IICS framework, comparative simulations with VISSIM's fully-actuated signal controls indicate marked improvements in managing travel times per mile, particularly under heightened AV penetration rates and lesser saturation headways. The enhanced adaptive control algorithm shows robust performance across varying flow conditions, optimizing signal phase management and trajectory alignment deftly.
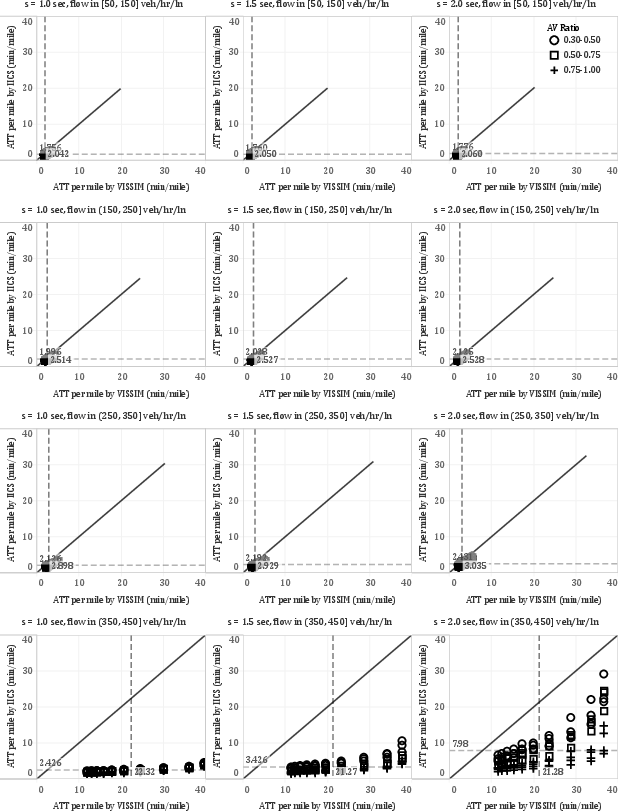
Figure 4: Average Travel Time per mile compared between IICS and fully-actuated signal control for conventional vehicles in VISSIM.
Implications and Future Research
The integration of AVs into intersection control systems presents considerable potential for improving traffic efficiency and reducing delays. The proposed IICS framework capitalizes on the strengths of AV V2I communications to optimize signalized intersection operations, setting a precedent for future system implementations. Despite its success under undersaturated conditions, further research is required to adapt this model for saturated traffic scenarios, where queue formation and management become prevalent. Progressive studies may consider extending the model's capabilities to incorporate pedestrian interactions and address broader infrastructural adaptations.
Conclusion
The paper provides a comprehensive strategy for optimizing signalized intersection performance, incorporating both AV technology and advanced signal control. With substantial reductions in travel time delays and effective management of mixed-traffic scenarios, the IICS framework presents a promising advancement in intelligent transportation solutions. Future research directions are pivotal in addressing oversaturated conditions, expanding on the algorithmic control of residual queues, thereby enhancing the robustness and applicability of the IICS in dynamic traffic environments.