- The paper presents a dynamic method for online parameter adaptation in admittance control that ensures system stability during human-robot interactions.
- It employs heuristic deviation detection and an energy tank method for aggressive inertia adaptations while maintaining system passivity.
- Experimental results on a KUKA LWR 4+ robot validate improved reaction times and enhanced safety in physical human-robot interaction scenarios.
Admittance Control Parameter Adaptation for Physical Human-Robot Interaction
The paper "Admittance Control Parameter Adaptation for Physical Human-Robot Interaction" explores a methodology for adapting parameters in admittance control to ensure stable and safe interactions between humans and robots in shared workspaces. This essay provides a technical summary of the research, focusing on the implementation and implications of the proposed methods.
Introduction and Problem Overview
Admittance control is critical in physical human-robot interaction (pHRI) to enable robots to respond effectively to human forces. The stability of such systems is heavily dependent on precise parameter tuning, especially when unforeseen deviations occur due to human actions. The authors propose a novel approach to dynamically adapt these parameters to maintain passivity and system stability, validated through experimentation on a KUKA LWR 4+ robot.
Methodology for Parameter Adaptation
The authors introduce a heuristic method to detect deviations from a robot's nominal behavior, characterized by high amplitude oscillations in the end-effector when an operator's stiffness changes. This detection is based on monitoring deviations from desired dynamic models governed by specified inertia and damping parameters.
Detection of Deviations
The detection of deviations utilizes the inequality ∥Fext−Mdx¨−Ddx˙∥≤ε, where ε is a threshold. Deviations trigger parameter adaptation to restore nominal behavior without increasing human interaction effort excessively.
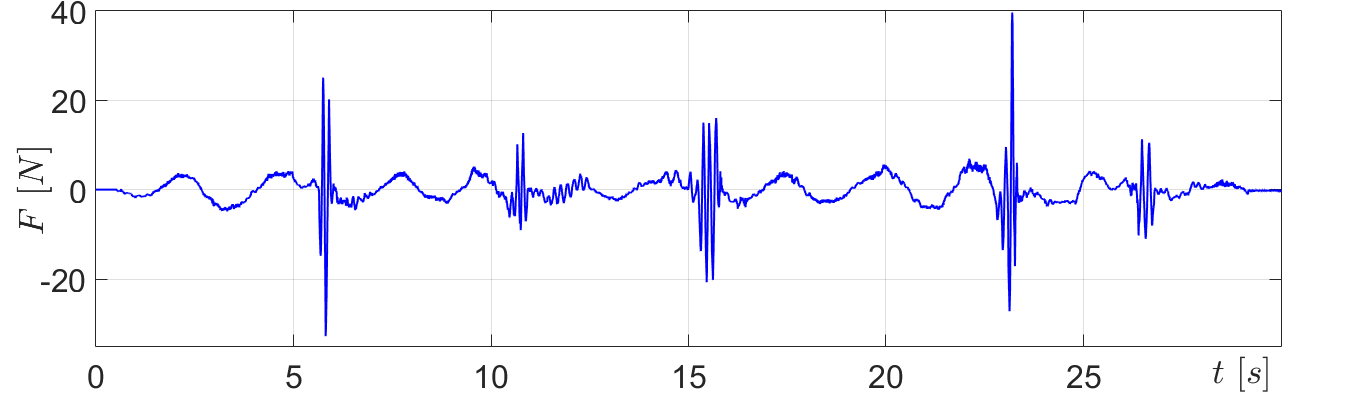
Figure 1: Force along the x-axis measured by the F/T sensor.
Parameter Adaptation Framework
The paper delineates a passivity-based approach for dynamically adapting parameters—specifically, inertia and damping matrices—during interaction. Two conditions are proposed:
- A standard passivity condition ensuring that M˙d(t)≤2Dd(t).
- A more flexible energy tank approach, where energy is stored and used to allow more aggressive modifications of inertia, catering for energy dissipation and extraction based on tank energy levels.
This flexible approach is less conservative and leverages stored energy to adapt parameters dynamically.
Experimental Validation
Experiments were conducted to validate the methodology, focusing on parameter adaptation with fixed damping and varying inertia, as well as maintaining a constant inertia-to-damping ratio.
Results
Experimental results demonstrate the efficacy of the energy tank method allowing larger inertia adaptations while maintaining system passivity and stability—a marked improvement over standard passivity conditions. Reaction times sufficiently protect the user from instability before perceptible feedback occurs, showing practical viability for real-time applications.
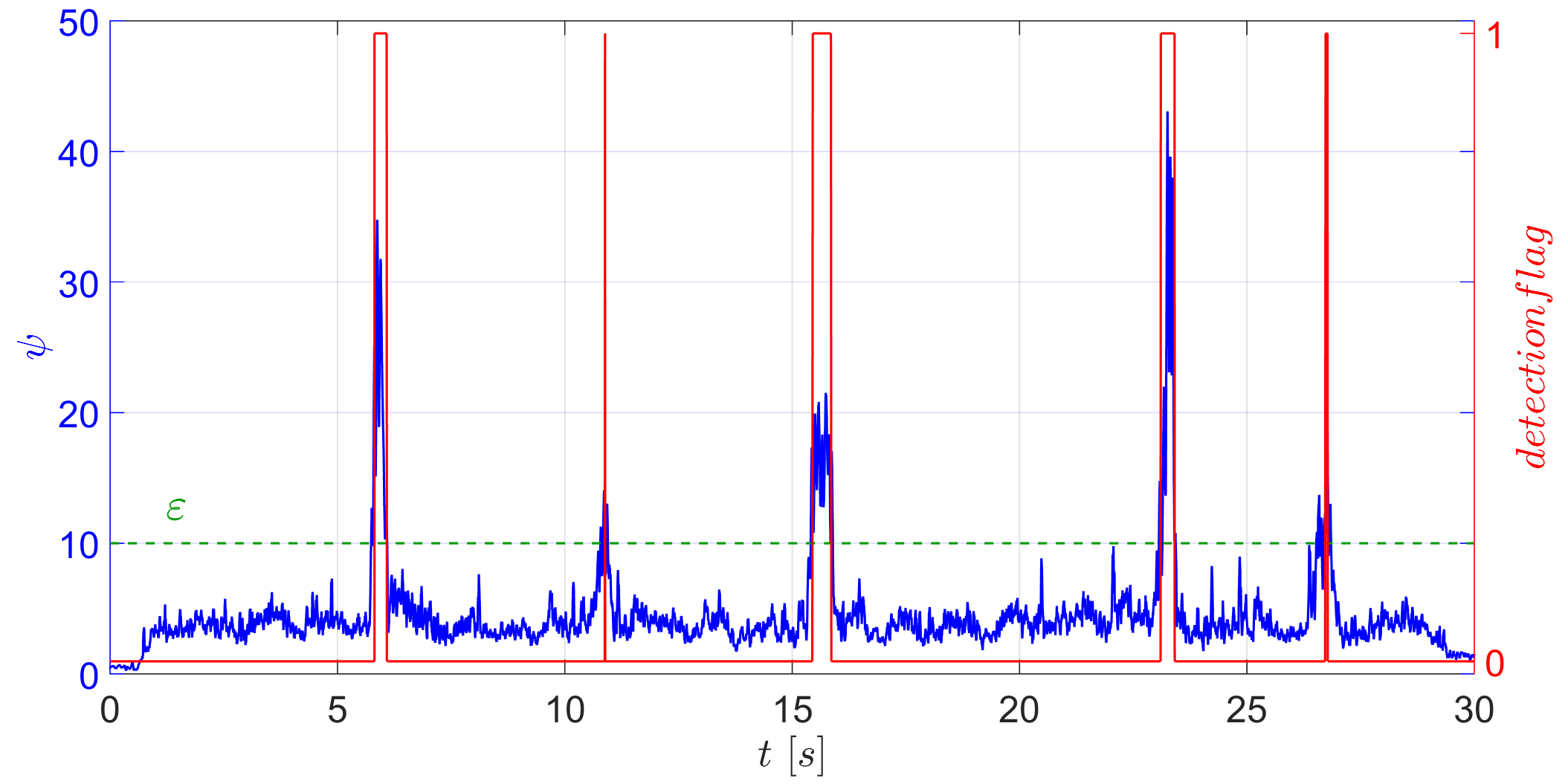
Figure 2: Evolution over time of ψ. A detection flag (red line) is added to show when the heuristic detects deviations from the nominal behavior.
Conclusion
The research presents a novel strategy for online parameter adaptation in admittance-controlled pHRI systems, ensuring robustness against deviations while maintaining interactive safety. Future work aims to refine detection heuristics, making them less dependent on application-specific thresholds and incorporating adaptive mechanisms for reducing control parameters when operator-induced stiffness decreases.
The approach contributes significantly to enhancing the control reliability of pHRI systems, offering potential for more intuitive and safer robotic interactions with human operators.

