- The paper presents a novel algorithm that dynamically generates suburban building floor plans in real-time using hierarchical graphs and spatial optimization.
- The methodology integrates Squarified Treemap partitioning and Dijkstra-like corridor optimization to enhance interior design realism and efficiency.
- Results validate that the generated floor plans closely mimic architect-designed layouts, offering practical applications in gaming and virtual simulations.
Introduction and Context
The paper "A Novel Algorithm for Real-time Procedural Generation of Building Floor Plans" proposes a sophisticated algorithm designed to generate suburban house floor plans dynamically in real-time. This capability is critical for applications such as video game environments where authentic and varied architectures enhance user experience. Floor plans generated via procedural methods offer significant advantages in seamlessly creating diverse environments on-the-fly, allowing developers to cater to scenarios with large virtual areas without increased manual design workload.
Literature and Methodology Review
The foundation of the algorithm is heavily based on prior work, particularly the algorithm discussed in Marson (2010). Existing procedural generation methods have mostly focused on exterior designs or visual facades of urban environments. These methods, while visually compelling, often lack the capability to produce detailed interiors in a time-effective manner, as highlighted by Müller et al. (2006). The work by Hahn (2006) provides a framework for handling large-scale interior generations but lacks the fine-tuning needed for realistic residential structures.
The presented algorithm differentiates itself with its ability to handle floor plan intricacies by modeling rooms as nodes in a hierarchical graph, optimizing corridor placement to ensure spatial efficiency. Strong emphasis is made on generating structures that align closely with architectural norms, thus minimizing impractical designs that arise from previous procedural algorithms.
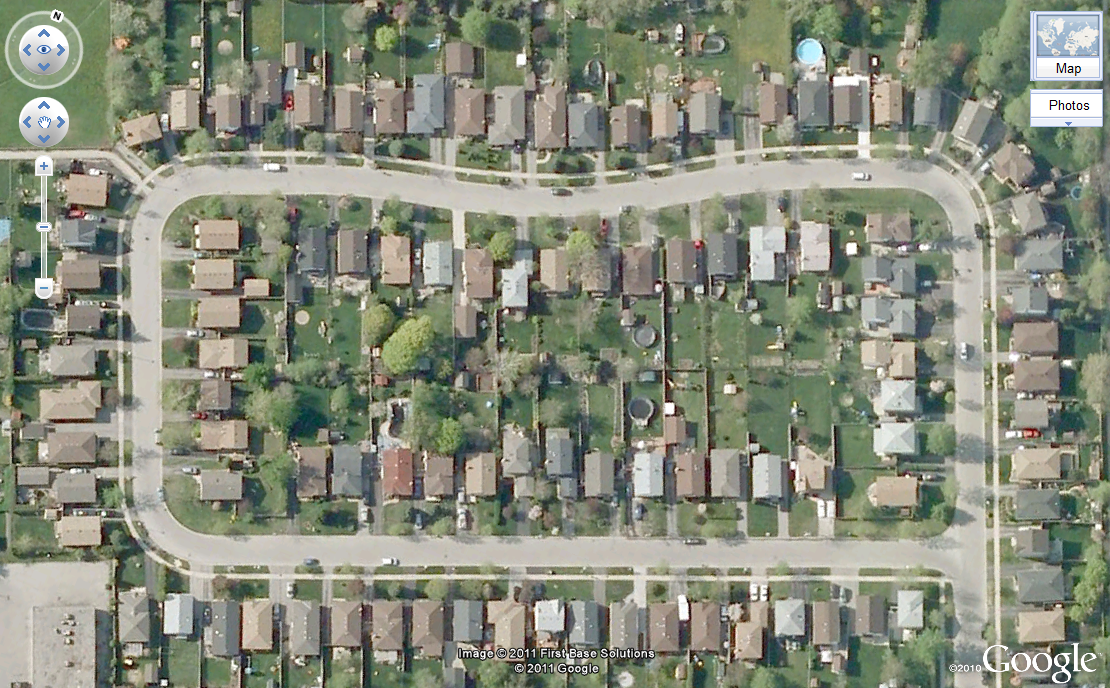
Figure 1: An aerial photo showing the similarity of homes in a neighbourhood.
Algorithm for Procedural Floor Plan Generation
Outer Shape and Room Placement
The algorithm begins with defining the building's outer rectangular shape based on a sampled aspect ratio, ensuring conformity to typical North American suburban styles (Figure 2). Utilizing a priority list derived from statistical insights, rooms within a house are assigned functional roles, leading to authentic configurations. The Squarified Treemap algorithm is employed to partition the space into rooms, ensuring optimal use of available area without long narrow rooms.
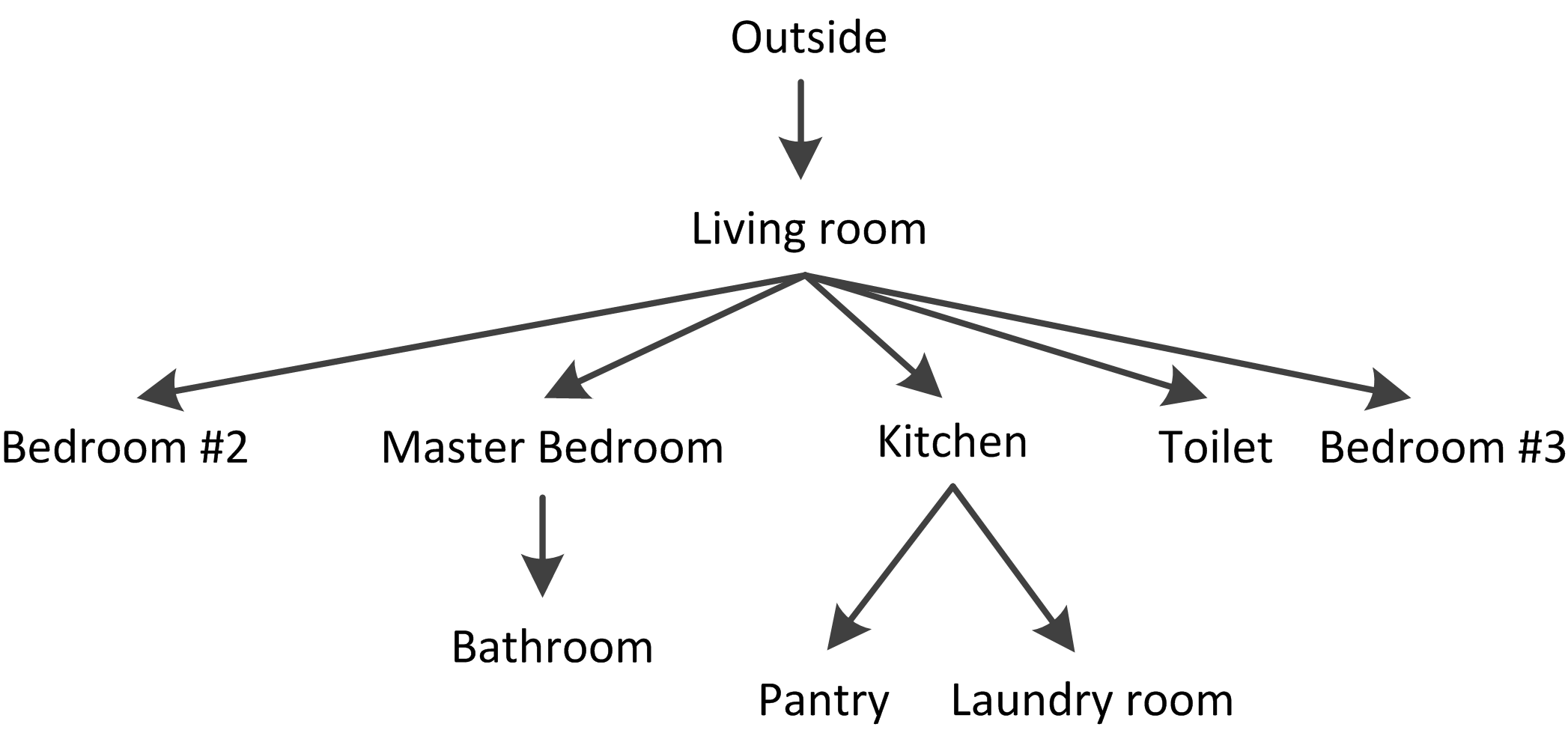
Figure 2: Hierarchy graph of a sample house.
Corridor Placement Optimization
One of the core contributions of the algorithm is its corridor placement mechanism that seeks to minimize wasted space. Traditional approaches often lead to inefficient designs that separate functional areas visually but fail spatially. By employing graph theory to model room connectivity and utilizing an optimization process similar to Dijkstra's algorithm, this algorithm strategically positions corridors to maintain access while reducing their footprint (Figure 3).
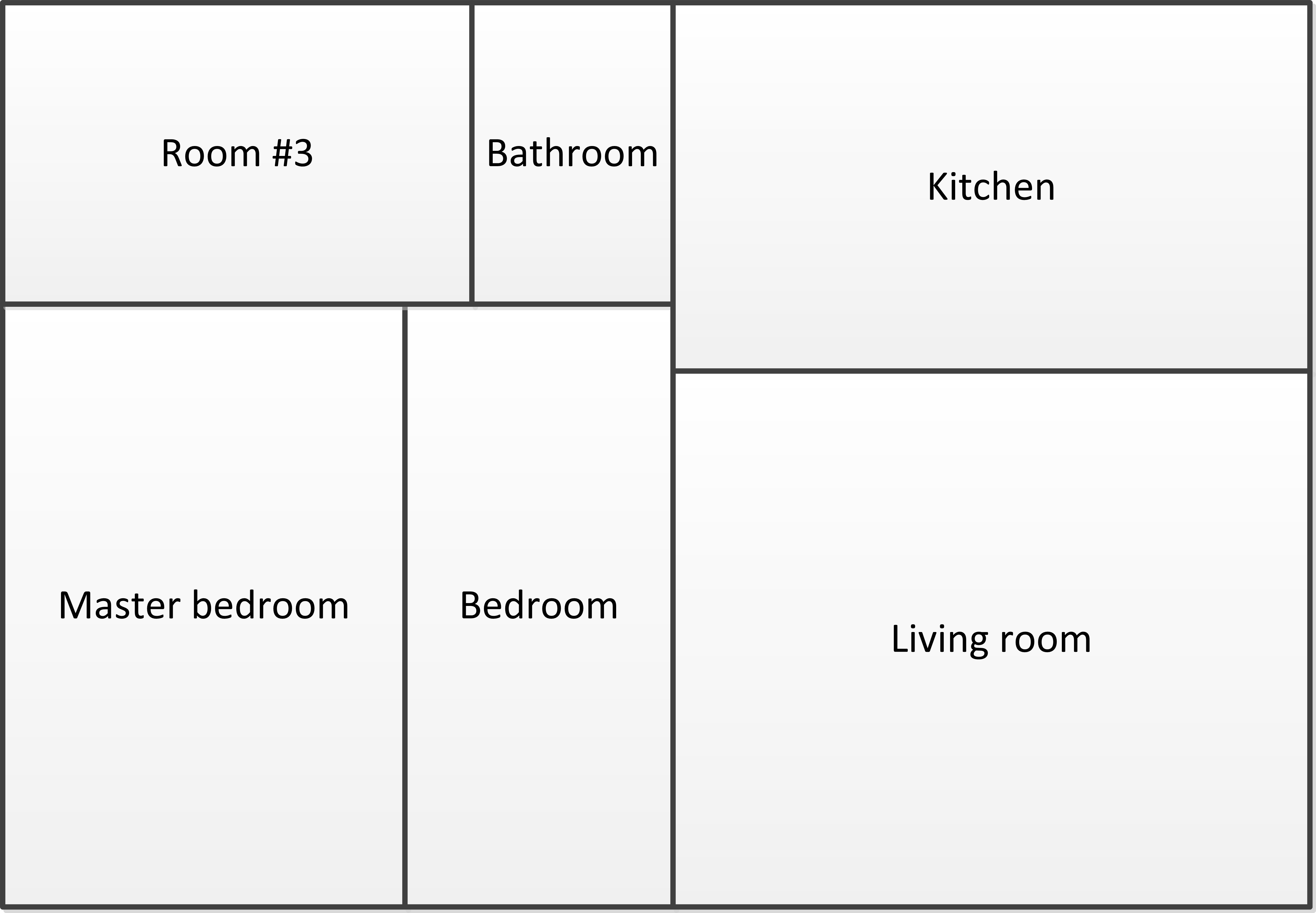
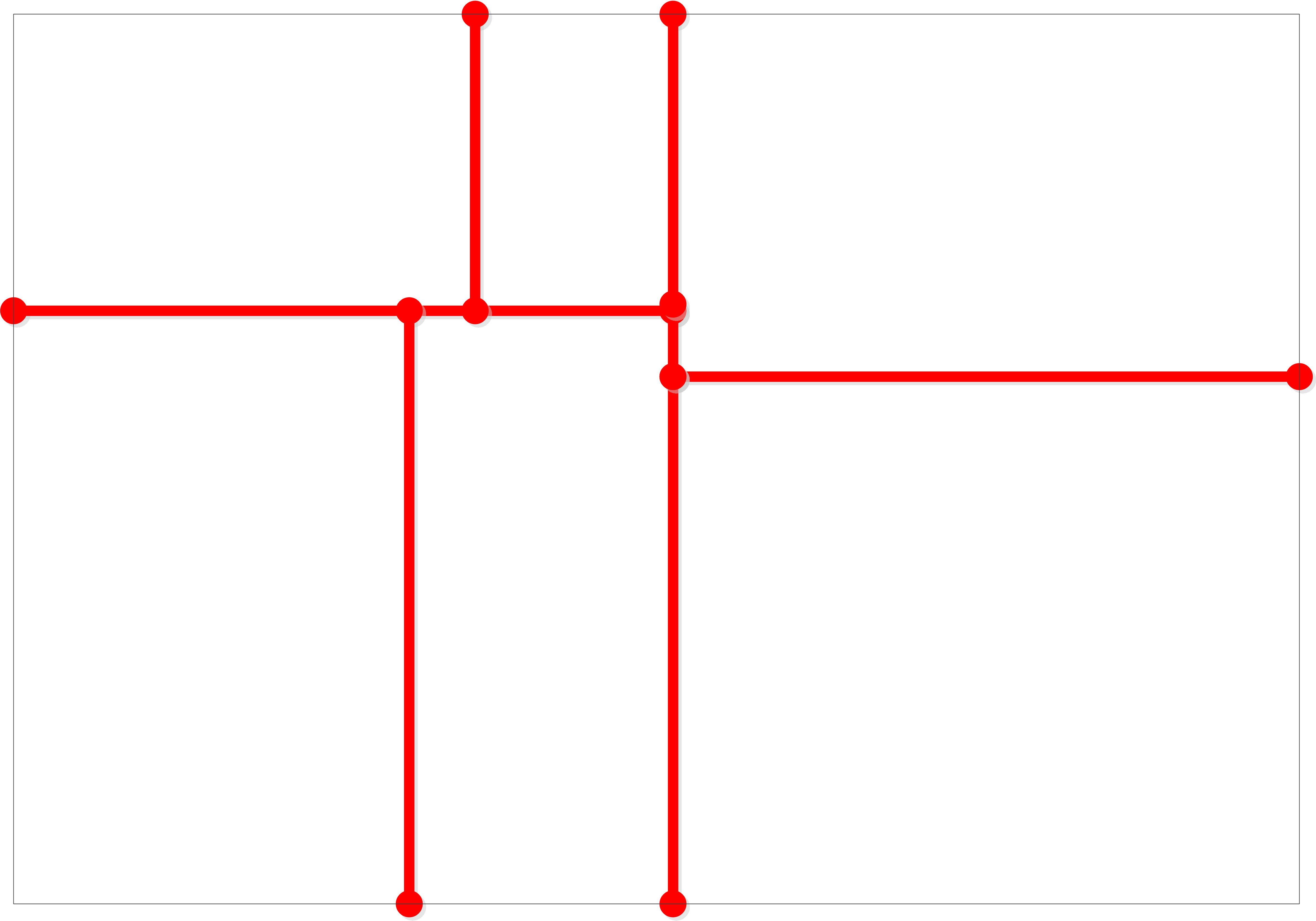

Figure 3: Finding the corridor path.
Window and Door Placement
Final phases of the algorithm place windows and doors based on adjacency rules and architectural standards. These are aligned to enhance natural lighting and accessibility while adhering to privacy norms in residential designs.
Results and Validation
Generated floor plans exhibit high levels of authenticity, closely matching real architect-designed examples with respect to layout and design practicality (Figure 4). The algorithm demonstrates its capability of producing diverse floor plans that can be leveraged within game worlds or architectural simulations, consistently embodying principles of efficient design.

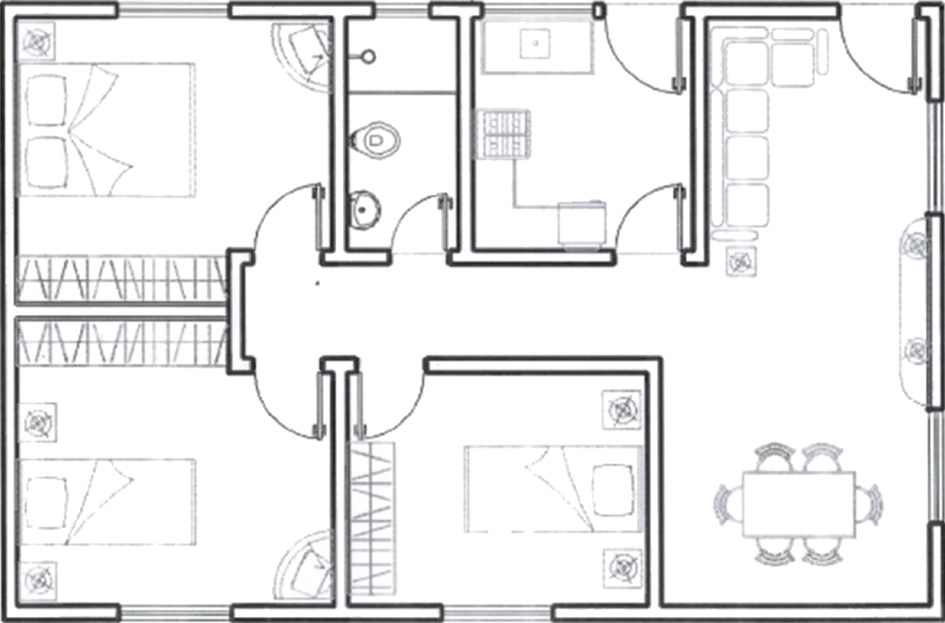

Figure 4: Comparison of generated and real floor plans along with their 3D realization.
Conclusion and Future Work
The algorithm outlined in this paper substantiates a viable solution for real-time floor plan generation tailored for suburban residences, with potential extensibility to other building types. The focus on minimizing unused corridor space and adhering to architectural norms showcases its practicality in dynamic virtual environments such as video games. Future work could explore expanding the algorithm's scope to accommodate varied architectural styles and incorporating machine learning techniques for enhanced realism and adaptive designs.
The procedural approach, with its inherent flexibility and efficiency, will likely see broader application in urban modeling, environment design for virtual reality, and automated architectural planning. The study paves the way for more integrated approaches in digital architecture and dynamic environment generation.